Un compte Premium offert sur le site FCL.055 ! Lire ici
25 membres en ligne en ce moment. Rejoignez-les pour consulter nos 15164 questions (20 mises à jour AUJOURD'HUI)
Question 176-1 : Si les informations de radial d'un vor visual omni range sont utilisées au delà de la distance de protection spécifiée des erreurs peuvent être causées par ? [ Pratique mission ]
Des interférences d'autres émetteurs
Question 176-2 : Quelle est la longueur d'onde d'un ndb transmettant sur 375 khz ?
800 m.
Longueur d'onde en m = 300 f en mhz longueur d'onde en m = 300000 f en khz longueur d'onde = 300000 375 khz = 800 m8000 m 80 m 8 m
Question 176-3 : La modulation de phase est ?
Un type de modulation utilisé dans les gps où la phase de la porteuse est inversée.
Un type de modulation utilisé dans les ils où la phase du signal de navigation change de 90° ou 150°. la cause d'un changement d'amplitude de la porteuse. la cause d'un changement de polarisation du signal modulé.
Question 176-4 : Les erreurs les plus à même d'affecter la performance d'un système ndbadf sont ?
Les interférences statiques l'effet de nuit l'absence de système indicateur de panne.
Existe aussi à l'examen avec la réponse les parasites atmosphériques les effets de propagation nocturne l'abscence d'un système avertisseur en cas de panne Les interférences statiques - interférence à la station - l'erreur de latitude erreur de hauteur - interférences à la station - effet des montagnes réfraction côtiaire - glissement en amon - effet des montagnes
Question 176-5 : En raison de l'effet doppler une diminution apparente de la fréquence transmise qui est proportionnelle à la vitesse de l'émetteur se produit quand ?
L'émetteur et le récepteur s'éloignent l'un de l'autre.
Les ondes radio voyagent à vitesse constante le récepteur peut ainsi calculer à quelle distance il se trouve de l'émetteur la vitesse est le plus souvent calculée par le récepteur en utilisant l'effet doppler qui est le principe par lequel la fréquence d'un signal change en raison du mouvement relatif de l'émetteur la fréquence diminue quand l'émetteur s'éloigne du récepteurL'émetteur se rapproche du récepteur. le récepteur se rapproche de l'émetteur. il n'y a pas de mouvement entre l'émetteur et le récepteur.
Question 176-6 : Parmi les causes suivantes de perturbations laquelle est la plus pénalisante pour la précision des relèvements de l'adf ?
Activité orageuse locale.
Effet de côte. erreur quadrantale. interférences dues aux précipitations.
Question 176-7 : L'avantage de l'utilisation d'antennes à fentes rayonnantes dans la technologie des radars météorologiques modernes est ?
D'éliminer pratiquement les lobes secondaires et donc de concentrer plus d'énergie dans le faisceau principal.
De transmettre simultanément les faisceaux relatifs à la météorologie et à la vision sol ('mapping'). d'avoir un large faisceau et par conséquence une meilleure détection des cibles. d'éliminer la nécessité d'un asservissement en azimut.
Question 176-8 : La fréquence qui correspond à une longueur d'onde de 12 cm est ?
Question 176-9 : La présence d'un cumulonimbus à proximité d'un aéronef peut produire de fausses indications sur les systèmes de navigation de l'appareilc'est particulièrement vrai pour ?
L'adf.
Le vor. le radar météo. le dme.
Question 176-10 : Un radio altimètre utilisant la technique d'émission d'ondes continues aura ?
Une antenne directionnelle pour la transmission et une autre pour la réception.
Une antenne omni-directionnelle pour la transmission et une directionnelle pour la réception. seulement une antenne directionnelle pour la transmission et pour la réception. une antenne directionnelle pour la transmission et une omni-directionnelle pour la réception.
Question 176-11 : Quelle affirmation concernant la stabilisation des antennes d'un radar météo embarqué est vraie ?
Elles sont stabilisées sur les axes de tangage et de roulis mais pas sur l'axe de lacet.
Exemple d'une antenne radar d'un boeing 757 2547on voit clairement le système de stabilisation 2548Elles sont stabilisées sur les axes de tangage, de roulis et de lacet. elles sont stabilisées sur l'axe de lacet, mais pas sur l'axe de tangage, ni de roulis. le pilote peut choisir les axes de stabilisation au moyen du commutateur de sélection de stabilisation du système.
Question 176-12 : Les antennes des radars météorologiques embarqués modernes ?
Sont stabilisées par des informations reçues du système d'attitude de l'aéronef.
Nécessitent une compensation gravitationnelle terrestre. sont stabilisées par un retour d'information des accéléromètres d'antenne. ne sont pas stabilisées.
Question 176-13 : Le type de modulation utilisé pour la fréquence porteuse d'un ils est ?
La modulation d'amplitude.
La modulation de fréquence. la modulation de phase. la double modulation.
Question 176-14 : L'erreur quadrantale d'un adf ?
Est causée par la réfraction sur le fuselage de l'aéronef et est compensée.
Est causée par l'interférence de l'onde ionosphérique. peut être causée par l'interférence des vor qui sont à portée du récepteur adf et ne peut être compensée. est causée par le magnétisme de l'aéronef et varie avec la déviation comme indiqué sur la table de déviation.
Question 176-15 : La zone de silence saut d'une transmission hf augmentera dans les circonstances suivantes ?
Une fréquence plus élevée et une position plus haute de la couche réflective de l'ionosphère.
Une fréquence moins élevée et une position plus haute de la couche réflective de l'ionosphère. une fréquence moins élevée et une position plus basse de la couche réflective de l'ionosphère. une fréquence plus élevée et une position plus basse de la couche réflective de l'ionosphère.
Question 176-16 : Quelle affirmation est juste à propos des erreurs et de leurs effets sur le signal d'un ndb ?
L'effet de montagne est due à la réflexion sur des terrains à forte pente qui peuvent causer des erreurs de relèvement importantes.
Les terrains à très forte pente falaise agissent comme des murs réfléchissant les ondes 1687 différence entre réfraction et réflexion L'effet de nuit est le résultat d'interférence entre les ondes de sol et les ondes d'espaces diminuant la portée du signal. des éclairs dans une atmosphère perturbée peuvent entrainer une diminution de la force du signal résultant en une diminution légère du relèvement. l'effet de côté peut entrainer d'importantes erreurs de relèvement causées par la réflexion du signal radio sur des côtes inclinées.
Question 176-17 : L'effet de nuit est causé par ?
Un changement dans la direction du plan de polarisation due à la réflexion dans l'ionosphère.
Le signal envoyé par un ndb est transmis à l'avion par les ondes de sol mais la nuit certaines de ces ondes rebondissent réfraction atmosphérique sur les couches e et f de l'ionosphère et trompe votre instrument adf l'effet de nuit provoque donc des erreurs de gisement sur l'adf cette effet est plus marqué à la tombé de la nuit et à l'aubeLa différence de vitesse des ondes em sur la terre et sur la mer, la nuit. l'absence d'onde de sol pour des distances supérieures à la distance de saut. les interférences entre les ondes de sol et d'espace.
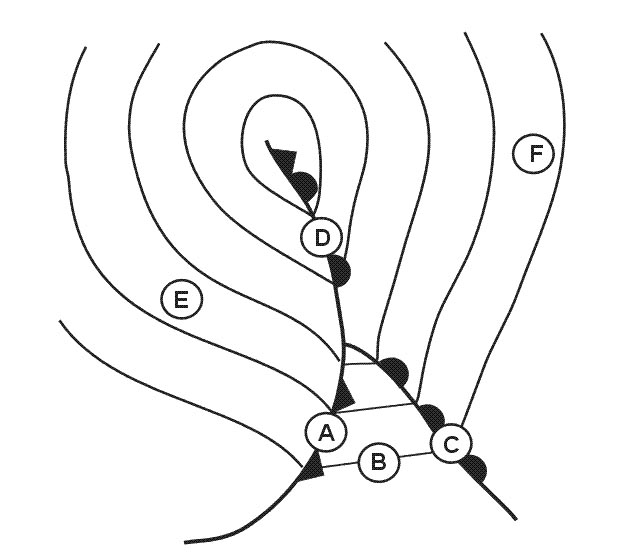
Question 176-18 : D'après l'annexe quel schéma correspond à une modulation d'amplitude 2069 ?
A.
B. c. d.
Question 176-19 : Une antenne dipôle dans sa forme basique adaptée à une fréquence de 110 mhz devra avoir une longueur de ?
136 cm.
Longueur d'onde en m = 300 f en mhz longueur d'onde en m = 300 110 = 272 m 272 cm une antenne dipôle a une longueur totale égale à une demi longueur d'onde donc 272 cm 2 = 136 cm273 cm. 91 cm. 205 cm.
Question 176-20 : L'unité hertz hz est définie par ?
Le nombre d'oscillations électromagnétiques par seconde.
La durée d'une oscillation complète. la distance parcourue par une onde radio en une seconde. le nombre d'oscilliations électromagnétiques par minute.
Question 176-21 : La fréquence d'un ndb est 427 khz la longueur d'onde correspondante est ?
7025 m.
Fréquence f en khz = 300000 longueur d'onde m 427 khz = 300000 longueur d'onde m longueur d'onde m = 300000 427 = 70257 m702,5 cm. 7025 cm. 70,25 cm.
Question 176-22 : Une onde électromagnétique est constituée d'un champ électrique oscillant e et d'un champ magnétique oscillant h leurs vitesses de propagation est de ?
La vitesse de la lumière.
La vitesse du son pour l'onde (e) et la vitesse de la lumière pour l'onde (h). la vitesse de la lumière pour l'onde (e) et la vitesse du son pour l'onde (h). la vitesse du son.
Question 176-23 : Les ondes électromagnétiques réfractées par les couches e et f de l'ionosphère se nomment ?
Ondes de ciel.
Ondes de surface. ondes de réfraction. ondes d'espace.
Question 176-24 : Le type d'antenne la plus simple de conception est ?
Une antenne dipôle dont la longueur totale est égale à une demi longueur d'onde.
Une antenne parabolique utilisée pour les radars météorologiques embarqués. une antenne à fentes rayonnantes employée pour les radars météorologiques. une antenne cadre ou boucle employée pour les récepteurs adf d'anciennes générations.
Question 176-25 : Une onde électromagnétique est constituée d'un champ électrique oscillant e et d'un champ magnétique oscillant h la proposition correcte est ?
Le champ e et le champ h sont perpendiculaires l'un à l'autre.
Une antenne dipôle est uniquement capable de transmettre le champ (h). le champ (h) est parallèle au cable et le champ (e) est perpendiculaire à ce dernier. lorsqu'un courant continu est envoyé à travers l'antenne, les champs (e) et (h) sont parallèles.
Question 176-26 : La fréquence qui correspond à une longueur d'onde de 825 m est ?
3636 mhz.
Fréquence f en mhz = 300 longueur d'onde m fréquence f en mhz = 300 825fréquence f en mhz = 3636 mhz3636 mhz 363,6 mhz 3,63 mhz
Question 176-27 : La fréquence qui correspond à une longueur d'onde de 3 km est ?
100 khz.
Fréquence f en khz = 300000 longueur d'onde m fréquence f en khz = 300000 3000 m fréquence f en khz = 100 khz10 khz. 1000 khz. 1 mhz.
Question 176-28 : Quelle est la longueur d'onde d'une fréquence 11795 mhz ?
25 m.
Longueur d'onde en m = 300 f en mhz longueur d'onde = 300 11795 = 254 m25 m. 250 m. 254 m.
Question 176-29 : Concernant la propagation des ondes dans l'ionosphère on distingue généralement trois régions ou couches aux propriétés différentes ces trois régions sont nommées ?
D e et f et leurs épaisseurs sont variables dans le temps.
D, e et f et leurs épaisseurs restent stables dans le temps. a, b et c et leurs épaisseurs sont variables dans le temps. a, c et e et leurs épaisseurs restent inchangées dans le temps.
Question 176-30 : Quelle est la vitesse de propagation des ondes électromagnétique ?
La vitesse de la lumière.
Vitesse de la lumière 300000kms ou 162000 nmsLa vitesse du son. la vitesse dépend du type d'onde électromagnétique. à une vitesse inférieure à la vitesse du son.
Question 176-31 : En accord avec l'itu international telecommunication union les signaux radio peuvent être classés par code de trois symboles le troisième symbole concerne exemple a1a ?
La nature de l'information transmise.
a1a a > modulation d'amplitude double bande latérale porteuse normale1 > signal digital sans emploi d'une sous porteuse modulantea > télégraphie pour réception auditivele premier symbole lettre concerne le type de modulation de la porteuse principale le second symbole chiffre concerne la nature du signal de la porteuse principale le troisième symbole lettre concerne la nature de l'information transmise Le type de modulation de la porteuse principale. la nature du signal de la porteuse principale. le type de modulation de la porteuse secondaire.
Question 176-32 : En accord avec l'itu international telecommunication union les signaux radio peuvent être classés par code de trois symboles le deuxième symbole concerne exemple a2a ?
La nature du signal de la porteuse principale.
a2a a > modulation d'amplitude double bande latérale porteuse normale2 > signal digital avec emploi d'une sous porteuse modulantea > télégraphie pour réception auditivele premier symbole lettre concerne le type de modulation de la porteuse principale le second symbole chiffre concerne la nature du signal de la porteuse principale le troisième symbole lettre concerne la nature de l'information transmise La nature de l'information transmise. le type de modulation de la porteuse secondaire. le type de modulation de la porteuse principale.
Question 176-33 : En accord avec l'itu international telecommunication union les signaux radio peuvent être classés par code de trois symboles le premier symbole concerne exemple a1a ?
Le type de modulation de la porteuse principale.
a1a a > modulation d'amplitude double bande latérale porteuse normale1 > signal digital sans emploi d'une sous porteuse modulantea > télégraphie pour réception auditivele premier symbole lettre concerne le type de modulation de la porteuse principale le second symbole chiffre concerne la nature du signal de la porteuse principale le troisième symbole lettre concerne la nature de l'information transmise La nature du signal de la porteuse principale. la nature de l'information transmise. le type de modulation de la porteuse secondaire.
Question 176-34 : Les ondes vhf très haute fréquence apparaissent dans le spectre de fréquence suivant ?
30 mhz 300 mhz.
Gamme de fréquences vhf utilisées en aéronautique 118 mhz à 137 mhzretenez le tableau suivant 16823 mhz - 30 mhz 300 mhz - 3000 mhz 3 ghz - 30 ghz
Question 176-35 : En rapport à la propagation des ondes radio un cycle est défini comme ?
Une série complète de données d'un processus périodique.
Un nombre d'oscillation par seconde. la longueur de l'impulsion. la distance parcourue par une onde radio en une seconde.
Question 176-36 : Les ondes vlf très basse fréquence apparaissent dans le spectre de fréquence suivant ?