Un compte Premium offert sur le site FCL.055 ! Lire ici
7 membres en ligne en ce moment. Rejoignez-les pour consulter nos 15164 questions (20 mises à jour AUJOURD'HUI)
Question 185-1 : La zone sensible d'un ils est la zone dans laquelle les véhicules ou les avions au roulage ne peuvent pas pénétrer lorsque ? [ Question protocole ]
Des opérations ils de catégorie iiiii sont en cours
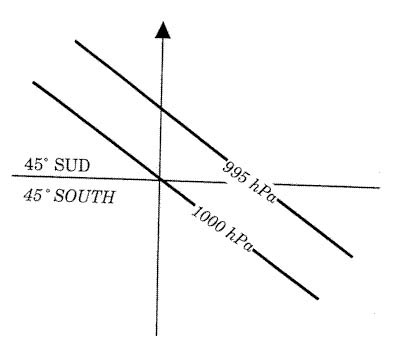
Question 185-2 : Vous volez sur une voie aérienne de 10 milles marins de large 5 milles marins de chaque côté de l'axe la distance jusqu'au vordme que vous utilisez est de 100 milles marins si vous êtes à la limite de la voie aérienne quel sera l'écart de points indiqué par l'aiguille du vor si un point représente ?
15.
Voir la figure comme le montre la figure l'avion se trouve sur la limite de la voie aérienne à 5 nm de la route prévue le cdi affichera donc une déviation vers la droite puisque la route sélectionnée sera directement en rapprochement de la station la distance affichée par le dme est de 100 nm ce qui devrait être l'hypoténuse mais pour une telle distance nous pouvons estimer que la distance par rapport à la voie aérienne est la même pour calculer l'angle de déviation de l'avion par rapport à la route prévue nous pouvons utiliser les formules suivantes tangente angle de correction = distance par rapport à la route prévue distance à parcourir = 5 nm 100 nm = 005tan 1 005 = 286° = 3°si un point représente 2° alors 3° sera égal à 1 point 2° 3° = 3° x 1 point 2° = 15 pointssolution 1 60 • angle d'erreur de piste = dist hors piste 60 ÷ dist le long de la piste • tea = 5 nm 60 ÷ 100 nm • tea = 3°si un point représente 2° alors 3° sera égal à 15 points4,5 3.0 6.0
Question 185-3 : Si un avion vole le long d'un radial vor il suivra ?
Une route orthodromique.
Une radiale est un relèvement magnétique partant d'une station vor les radiales se déplacent le long de la rose des vents dans toutes les directions elles suivent la courbure de la terre tout comme les trajectoires orthodromiques 1462la loxodromie est utilisée pour planifier un vol sur une carte 2dla trajectoire orthodromique marque la distance la plus courte entre deux points ce qui est utile en navigation en raison de la convergence la trajectoire change généralement le long du grand cercle de l'équateur et de tous les méridiens longitudes qui traversent verticalement la terre tout cercle autre qu'un grand cercle est appelé petit cercle également appelé parallèle de latitudeUne route loxodromique. une route magnétique constante. une route de relèvement constante.
Question 185-4 : Les localisateurs sont 1 les ndb de forte puissance utilisés pour la navigation en route et sur les voies aériennes 2 les ndb de faible puissance utilisés pour l'approche des aérodromes ou des pistes 3 les balises d'une portée généralement comprise entre 10 et 250 nm 4 les balises d'une portée ?
2 et 4.
Français les ndb utilisés pour l'aviation sont normalisés par l'annexe 10 de l'oaci qui spécifie que les ndb doivent fonctionner sur une fréquence comprise entre 190 khz et 1750 khz chaque ndb est identifié par un indicatif d'appel en code morse d'une deux ou trois lettres les balises non directionnelles sont classées par puissance de sortie la puissance nominale faible est inférieure à 50 watts la puissance moyenne de 50 w à 2 000 w et la puissance élevée de plus de 2 000 w 2 il existe quatre types de balises non directionnelles dans le service de navigation aéronautique les ndb en route utilisés pour marquer les voies aériennes les ndb d'approche les balises d'alignement de piste les balises de localisation les deux derniers types sont utilisés en conjonction avec un système d'atterrissage aux instruments ils les balises de localisation sont des balises de faible puissance avec une portée comprise entre 10 et 25 nm maximum1 et 4. 2 et 3. 1 et 3.
Question 185-5 : Un avion vole au niveau de vol 240 la valeur dme non corrigée pour l'altitude est de 8 nm quelle est la distance au sol jusqu'à la balise ?
70 nm.
Voir la figure l'équipement de mesure de distance dme est une balise de navigation qui indique la position de l'avion par rapport à la balise l'avion émet un signal qui est renvoyé par l'équipement au sol du dme en fonction du délai de réception du signal l'avion peut calculer la distance relative à l'équipement au sol du dme comme le montre la figure l'avion se trouve à une altitude de 24 000 pieds fl240 la distance oblique entre l'avion et le dme est de 8 milles marins en calculant la distance au sol entre l'avion et la station dme convertissez les 24 000 pieds en milles marins utilisez le tableau suivant 1 mille marin = 6 080 pieds 24 000 pieds = 24000 ft x1 nm 6080 ft = 395 nm en utilisant les formules abc on peut calculer ce qui suit a² + b² = c² sachant que a = 395 nm b = c = 8 nm la réécriture des formules donne ce qui suit b² = c² a² b² = 8 ² 395 ² b² = 484 b = 484 = 695 nm = 7 nm7,3 nm 7,5 nm 6,5 nm
Question 185-6 : Quel est le niveau minimum conditions isa qu'un avion à une distance de 111 nm doit voler pour contacter la tour sur rt pour un relèvement vdf depuis un aéroport situé à 169 pieds au dessus du msl ?
Fl60.
Une installation vdf est l'abréviation de very high frequency vhf direction finding son utilisation permet au pilote de déterminer sa position actuelle la formule utilisée pour calculer la portée de ces ondes radio est la suivante portée théorique maximale en nm = 123 x h1 + 123 x h2 h1 = hauteur en pieds de l'émetteur au dessus du niveau moyen de la mer msl h2 = hauteur en pieds du récepteur au dessus du niveau moyen de la mer msl la réécriture des formules donne ce qui suit 123 x h1 = portée – 123 x h2 h1 = portée 123 x h2 123 ² sachant que portée = 111 nm h2 = 169 pi en complétant les formules on obtient ce qui suit h1 = 111 nm 123 x 169 123 ² = 5966 pi = fl60Fl100 fl80 fl50
Question 185-7 : Pour déterminer le radial vor le récepteur vor de l'avion… ?
Mesure la différence de phase entre la phase de référence et les signaux de phase variable.
Un radiophare omnidirectionnel vhf vor est utilisé comme balise de navigation pour les aéronefs doté d'un récepteur l'aéronef peut déterminer sa position par rapport à la balise vor la fréquence des vor se situe dans la gamme des très hautes fréquences vhf de 10800 à 11795 mhz une station sol vor envoie un signal hautement directionnel grâce à une antenne réseau à commande de phase parallèlement à ce signal le vor envoie un signal de référence de 30 hz uniforme dans toutes les directions la différence de phase entre le signal de référence et le signal hautement directionnel correspond au relèvement de la station vor par rapport au nord magnétique un récepteur vor fonctionne en comparant la relation de phase entre un signal de référence et un signal variableUtilise des techniques d'impulsion. mesure la différence de temps entre l'envoi du signal d'interrogation et la réception du signal du transpondeur. mesure la différence de temps entre la réception des deux signaux transmis par l'installation au sol.
Question 185-8 : Laquelle des propositions suivantes décrit correctement le diagramme de rayonnement du localisateur du système d'atterrissage aux instruments ils ?
Deux lobes superposés sur la même fréquence porteuse vhf.
Radiation pattern are 90 hz and 150 hz signals 2582distribution of the frequencies seen in the approach direction 2583if the aircraft is exactly on the glidepath on the exact runway centreline it receives a balance between modulationsDeux lobes superposés sur la même fréquence porteuse uhf deux lobes superposés sur des fréquences porteuses radio différentes mais avec la même modulation un faisceau crayon comprenant une série de faisceaux plus petits, chacun portant une modulation différente
Question 185-9 : Le marqueur intermédiaire d'une installation de système d'atterrissage aux instruments ils est identifié de manière sonore et visuelle par une série de ?
Des points et des tirets alternés et un voyant orange clignotant.
Voir la figure il existe trois types de balises généralement installées dans le cadre d'un système d'atterrissage aux instruments la balise extérieure cette balise indique normalement le repère d'approche finale faf elle est située entre 4 et 7 nm du seuil de piste sur la même trajectoire que le localizer lorsqu'elle passe devant la balise extérieure le pilote reçoit une tonalité audio continue de 400 hz accompagnée d'un feu bleu clignotant en séquence continue de tirets de 2 secondes la balise centrale cette balise indique normalement le point d'approche interrompue cat i et est située entre 05 et 08 nm du seuil de piste lorsqu'elle passe devant la balise centrale le pilote reçoit une tonalité audio continue à 1 300 hz accompagnée d'un feu orange clignotant en séquence alternée de points et de tirets la balise intérieure cette balise indique normalement le passage du seuil de piste lorsqu'elle passe devant la balise intérieure le pilote reçoit une tonalité audio continue de 3 000 hz accompagnée d'un feu blanc clignotant en séquence de pointsDes tirets et un voyant orange clignotant deux tirets par seconde et une lumière bleue clignotante des points et une lumière blanche clignotante
Question 185-10 : Les fréquences mls et les canaux disponibles sont ?
Dans la bande shf séparation de fréquence de 300 khz donnant 200 canaux disponibles.
Le système d'atterrissage micro ondes mls a été conçu pour remplacer l'ils par un système d'approche de précision avancé capable de pallier ses inconvénients et d'offrir une plus grande flexibilité à ses utilisateurs cependant peu d'installations mls sont actuellement en service et il est probable qu'elles cohabiteront avec l'ils pendant longtemps le mls est un système d'approche et d'atterrissage de précision qui fournit des informations de position et diverses données sol air ces informations de position sont fournies sur un large secteur de couverture et sont déterminées par une mesure d'angle d'azimut une mesure d'élévation et une mesure de distance le système d'atterrissage micro ondes mls présente les caractéristiques suivantes 200 canaux sont disponibles dans le monde entier la couverture azimutale est d'au moins ± 40° de l'alignement de piste qdm et des pentes de descente de 09° à 20° peuvent être sélectionnées la portée utilisable est de 20 à 30 nm à partir du site mls 20 nm au royaume uni les transmissions en retour de trajectoire ne posent aucun problème un système secondaire assure le guidage de dépassement et de départ à ± 20° de la direction de la piste jusqu'à 15° d'élévation sur une portée de 10 nm et une hauteur de 10 000 pieds il fonctionne dans la bande shf 5 031 5 090 mhz cela permet son implantation en terrain vallonné sans nivellement les erreurs de déviation de trajectoire courbure du localisateur et de la trajectoire de descente causées par les avions les véhicules et les bâtiments ne posent plus de problème car le faisceau de balayage mls peut être interrompu évitant ainsi les réflexionsDans la bande shf pour les éléments mls et la bande vhf pour le dme, 100 canaux disponibles. dans la gamme 5060 – 5090 mhz, 200 khz de séparation donnant 150 canaux disponibles. dans la bande vhf et uhf, 40 canaux disponibles.
Question 185-11 : Un avion se dirige vers une balise radio tout en maintenant un cap relatif nul si le cap magnétique diminue l'avion subit ?
Dérive à droite.
Français voir la figure lorsqu'un avion se dirige vers par exemple une station vor cela signifie qu'il suit le cap le plus direct pour atteindre la station il est important de savoir que le cap ne tient pas compte du vent le déplacement latéral qu'un avion subit en raison du vent est appelé dérive comme le montre la figure l'avion se dirige vers la station vor au cap 360 cependant c'est le cap nécessaire pour voler directement vers la station sans tenir compte de la dérive subie la direction de la dérive dépend de la direction du vent pour corriger l'angle de dérive un angle de correction du vent est nécessaire la correction du vent est toujours contre le vent donc vent gauche angle de correction du vent gauche vent droit angle de correction du vent droit en règle générale lorsque l'avion subit une dérive à droite c'est à dire un vent de gauche la trajectoire sera cap + angle de dérive lorsque l'avion subit une dérive à gauche c'est à dire un vent de droite la trajectoire sera cap – angle de dérive si le cap 360 est sélectionné mais que la trajectoire indique le cap 010 l'avion n'atteindra pas la station lorsque le cap magnétique de l'avion diminue ce qui signifie que le cap devient inférieur à 360 l'avion corrige la dérive vers la droite comme le montre la ligne pointillée rouge sur la figureDérive nulle dérive à gauche un vent d'ouest
Question 185-12 : Laquelle des perturbations suivantes est la plus susceptible de provoquer la plus grande imprécision dans les roulements adf ?
Activité orageuse locale.
Les orages peuvent provoquer de très puissantes décharges d'électricité statique sur tout le spectre électromagnétique y compris en basse fréquence bf et en moyenne fréquence mf ces décharges provoquent les erreurs les plus graves en ndbadf une décharge statique dans un cumulonimbus cb peut se traduire par un fort crépitement sur l'audio et l'aiguille se déplace rapidement vers la source du cb si plusieurs orages sont actifs dans la zone l'aiguille peut les pointer pendant une période plus longue effet côtier interférence des précipitations erreur quadrantale
Question 185-13 : à quoi sert le cas échéant une station tacan militaire pour l’aviation civile ?
Il peut fournir une portée dme.
Objectif d'apprentissage 06202040108 indiquer que les stations militaires d'aide à la navigation aérienne tactique uhf tacan peuvent être utilisées pour les informations dme les tacan sont des aides radio militaires utilisables par les avions militaires équipés du récepteur approprié elles peuvent fournir des informations de distance et de rayon à l'instar d'une installation vordme les avions civils sont limités et peuvent utiliser la fonction de distance comme un dme mais ne peuvent pas recevoir les informations de rayon cela ne sert à rien pour l’aviation civile il peut fournir une distance dme et un relèvement magnétique il peut fournir un palier magnétique
Question 185-14 : Laquelle des fréquences suivantes est une fréquence de localisation ils ?
10915 mhz.
La fréquence du localisateur ils est comprise entre 10810 et 11195 mhz vhf seules les fréquences commençant par une décimale impaire sont utilisées comme fréquences de localisateur par exemple 10810 10815 10830 10835 etc la seule bonne réponse à cette question est la fréquence comprise entre 10810 et 11195 mhz qui possède une décimale impaire soit 10915 mhz suite sur la page suivante nom de la fréquence fréquence application très basse fréquence vlf 3 30 khz néant basse fréquence lf 30 300 khz ndbadf moyenne fréquence mf 300 3 000 khz ndbadf communications longue portée haute fréquence hf 3 30 mhz communications longue portée très haute fréquence vhf 30 300 mhz communication courte portée vdf vor ils localizer balises de repérage ultra haute fréquence uhf 300 3 000 mhz ils glide path dme ssr communications par satellite gnss radars longue portée super haute fréquence shf 3 30 ghz radalt awr mls radars courte portée extrêmement haute fréquence ehf 30 300 ghz néant112,10 mhz 110,20 mhz 108,25 mhz
Question 185-15 : Un ndb transmet un modèle de signal dans le plan horizontal qui est ?
Omnidirectionnel.
Radiophare non directionnel ndb le ndb est un émetteur terrestre fonctionnant dans les bandes mf ou lf et situé dans une station terrestre qui diffuse des signaux dans toutes les directions omnidirectionnels qui sont reçus par l'adf ou automatic direction finder un instrument standard à bord des aéronefs un cardioïde équilibré à 30 hz un faisceau tournant à 30 hz circulaire bilobée
Question 185-16 : Un vor et un ndb sont situés au même endroit les relevés du vor et de l'adf sont affichés sur le rmi l'avion s'éloigne des balises le long du radial 090 la déclinaison magnétique change rapidement laquelle des affirmations suivantes est correcte ?
La direction du pointeur adf changera la direction du pointeur vor ne changera pas.
Il existe des différences significatives entre les systèmes adf et vor un système de radiogoniométrie automatique adf utilise une balise non directionnelle ndb au sol qui diffuse un signal am omnidirectionnel captable par le système adf de l'avion ainsi le ndb peut être localisé au sol l'adf est un système de navigation à courte et moyenne portée fonctionnant entre 190 et 1750 khz un système vhf à radiogoniométrie omnidirectionnelle vor fonctionne sur le principe de la différence de phase entre les deux signaux radio émis par la station vor l'un est omnidirectionnel tandis que l'autre est variable sur 360 degrés radiaux le vor fonctionne dans la gamme de fréquences comprise entre 108 et 11795 mhz la principale différence entre les systèmes adf et vor réside dans la déclinaison magnétique en mode ndbadf la déclinaison magnétique change au niveau des instruments de bord en mode vor la déclinaison magnétique se produit toujours au niveau de la station elle même en s'éloignant de la station le rayon de vol de l'avion sera toujours le même car il ne change pas à l'avion l'aiguille de l'adf affichera une variation variation magnétique à mesure que l'avion s'éloigne de la stationLa direction du pointeur vor changera, la direction du pointeur adf ne changera pas. ni la direction du pointeur adf ni la direction du pointeur vor ne changeront. la direction du pointeur adf et la direction du pointeur vor changeront.
Question 185-17 : Laquelle des affirmations suivantes est correcte concernant les faux faisceaux sur une trajectoire de descente ?
Les faux faisceaux ne seront trouvés qu'au dessus de la trajectoire de descente correcte.
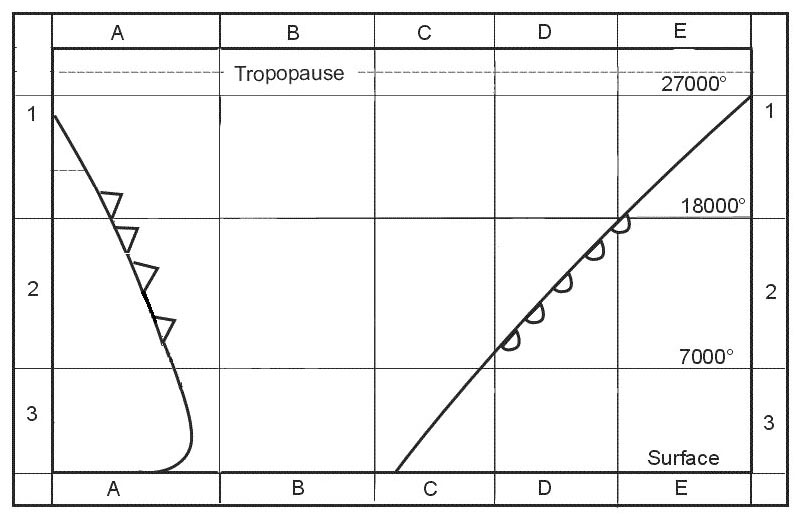
Voir la figure le plan de descente fonctionne de manière similaire au localizer sauf qu'il opère en ultra haute fréquence uhf et non en très haute fréquence vhf comme le montre la figure le plan de descente comporte deux lobes un lobe à 90 hz indiquant que l'avion est au dessus du plan de descente et un lobe à 150 hz indiquant que l'avion est en dessous le centre est généralement réglé sur un plan de descente de 3° malgré la précision du système des lobes secondaires peuvent se former ces lobes secondaires sont moins puissants que les principaux mais peuvent générer plusieurs fausses pentes de descente au dessus du lobe principal on ne rencontre jamais de fausses pentes de descente lors d'une approche par en dessous du plan de descente le taux de descente peut indiquer une fausse pente de descente si le taux de descente requis est supérieur à celui indiqué dans les tableaux par exemple 1 500 pimin au lieu de 500 pimin l'avion sera sur une fausse pente de descente la fausse trajectoire de descente est généralement environ deux fois supérieure à l'angle normal et les lobes latéraux les plus faibles peuvent indiquer jusqu'à 4 fois l'angle de descenteLes faux faisceaux ne seront trouvés qu'en dessous de la trajectoire de descente correcte. les faux faisceaux ne seront détectés qu'à plus de 10 degrés à gauche ou à droite de l'axe central du localisateur. les faux faisceaux ne sont présents que lors d'une approche ils à faisceau arrière.
Question 185-18 : Laquelle des propositions suivantes répertorie correctement les principaux composants au sol d’un système d’atterrissage à micro ondes mls ?
Transmetteurs d'azimut et d'élévation séparés fonction dme.
Le système d'atterrissage micro ondes mls est un système de radioguidage de précision utilisé pour guider l'avion vers la piste son principe est le même que celui d'un système d'atterrissage aux instruments ils il fournit un guidage horizontal et vertical pour l'atterrissage quelles que soient les conditions météorologiques le système se compose de plusieurs éléments azimut d'approche azimut arrière guidage en élévation guidage en distance dmep et communications de données émetteurs d'azimut et d'élévation séparés, balises de marquage extérieures et centrales émetteur combiné d'azimut et d'élévation, installation dme émetteur combiné d'azimut et d'élévation, balises de repérage extérieures et intérieures
Question 185-19 : L’une des utilisations du service vdf est de fournir aux aéronefs ?
Retour à la maison.
Le radiogoniomètre vhf vdf permet au pilote de déterminer la direction à suivre pour se diriger vers une station sol un cap ce cap peut servir à se rendre à la station sol ou à identifier la position exacte de l'avion grâce à plusieurs caps provenant d'autres stations vdf un pilote peut demander un cap vdf en utilisant le code q approprié les codes q suivants peuvent être utilisés qdm = cap magnétique vers la station qdr = cap magnétique depuis la station quj = cap vrai vers la station qte = cap vrai depuis la station vitesse au sol. altitude. titre.
Question 185-20 : Pour fournir au pilote la position de l'avion en l'absence de radar l'atc doit disposer d'au moins… ?
Deux vdf à des endroits différents capables de prendre des relèvements simultanément sur la fréquence émise.
Le vdf vhf direction finding est une méthode de mesure de la direction d'un signal vhf utilisée depuis plusieurs décennies par les stations sol elle est particulièrement utile car l'avion émetteur n'a besoin que d'une radio vhf standard pour demander un relèvement vdf à un atsu équipé cela peut lui fournir qdm relèvement magnétique de l'avion à la station qdr relèvement magnétique de la station à l'avion quj relèvement vrai de l'avion à la station qte relèvement vrai de la station à l'avion avec deux relèvements appropriés provenant de stations sol différentes on dispose de suffisamment d'informations pour calculer la position d'un avion que ce soit le pilote qui trace une carte et trouve la position ou les contrôleurs au sol qui utilisent leur système plus le relèvement est élevé plus la précision est élevée et les meilleurs relèvements sont ceux où les lignes se croisent à près de 90° cela signifie que deux stations sol vdf sont nécessaires sans être trop proches l'une de l'autre de nos jours un système informatique ayant accès à plusieurs antennes vdf peut effectuer un processus appelé auto triangulation pour déterminer l'emplacement exact d'une transmission donnée ce procédé est notamment utilisé par les systèmes de détresse et de diversion 1215 mhz trois vdf à différents endroits capables de prendre des relèvements simultanés sur des fréquences différentes. un vdf capable de prendre des relèvements simultanés sur différentes fréquences. deux vdf colocalisés, capables de prendre des relèvements simultanément sur la fréquence émise.
Question 185-21 : Les fréquences attribuées au ndb sont ?
190 khz à 1750 khz.
Un ndb radiophare non directionnel est un émetteur radio basse fréquence basé au sol utilisé pour l'approche aux instruments des aéroports et des plateformes offshore le ndb émet un signal omnidirectionnel reçu par l'adf radiogoniomètre automatique un instrument standard à bord des aéronefs le pilote utilise l'adf pour déterminer la direction du ndb par rapport à l'avion pour naviguer avec l'adf le pilote saisit la fréquence du ndb et la rose des vents ou la flèche de l'adf indique le cap vers la station le signal est transmis sans interruption 24h24 et 7j7 un indicatif d'appel audible en code morse composé d'une ou plusieurs lettres ou chiffres permet d'identifier le ndb reçu les ndb utilisés en aviation sont normalisés par l'oaci organisation de l'aviation civile internationale dont l'annexe 10 spécifie que le ndb doit être exploité sur une fréquence comprise entre 190 et 1800 khz les principaux composants d'une station terrestre ndb sont l'émetteur de balise le module de réglage d'antenne et l'antenne les ndb ont généralement une puissance de sortie de 25 à 125 watts pour une réception jusqu'à environ 100 milles marins des systèmes de puissance supérieure de 500 à 1 000 watts sont utilisés pour des applications à plus longue portée la portée dépend de plusieurs facteurs tels que la puissance de sortie l'antenne la conductivité du sol la fréquence les conditions du site la latitude et l'état du récepteur adf 1900 khz à 17500 khz. 1,90 khz à 17,50 khz. 19 hz à 17 500 hz.
Question 185-22 : Les localisateurs sont ?
Ndb lfmf utilisés comme aide à l'approche finale.
Les balises de localisation sont des ndb de faible puissance utilisés pour les procédures et les approches terminales avec une portée utile comprise entre 10 et 25 nm les ndb sont des balises non directionnelles qui émettent une onde porteuse simple avec une modulation se superposant à l'identifiant en code morse l'adf automatic direction finder est l'équipement du cockpit qui pointe une aiguille directement vers le ndb concerné en déterminant la direction d'où provient l'onde radio les ndb fonctionnent entre 190 et 1750 khz couvrant les bandes de fréquences lf basse fréquence 30 300 khz et mf moyenne fréquence 300 3000 khz balises d'une portée de 10 à 250 nm. adf de faible puissance utilisés pour l'approche sur aérodrome ou sur piste. ndb de haute puissance utilisés pour la navigation en route et dans les voies aériennes.
Question 185-23 : Selon l'annexe 10 de l'oaci un localisateur a une portée de ?
10 à 25 nm.
Voir la figure le marqueur extérieur qui identifie normalement le repère d'approche finale faf est souvent associé à un radiophare non directionnel ndb qui ensemble forment le marqueur extérieur de localisation lom le lom sert d'aide à la navigation pour l'ils afin que les aéronefs soient alertés de leur survol et puissent s'y rendre directement comme le montre la figure l'annexe 10 de l'oaci stipule ce qui suit 75 à 250 nm 7,5 à 15 nm 75 à 150 nm
Question 185-24 : Tvor est un ?
Vor à portée limitée utilisé dans la zone terminale.
Applications vor les vor sont utilisés pour la navigation en route généralement pour définir les axes des voies aériennes la précision globale requise pour l’affichage des informations est de ± 5° lors du premier tracé des voies aériennes européennes une précision inférieure de ± 75° était supposée pour maintenir un aéronef dans les limites d’une voie aérienne de 10 nm la distance maximale entre les balises a été calculée à 80 nm les vor peuvent être classés comme suit un vor terminal tvor est une balise de faible puissance utilisée dans le cadre d’une approche d’aérodrome les tvor partagent les fréquences plus basses avec l’ils un vor de diffusion est généralement une aide terminale avec une diffusion vocale diffusant les informations météorologiques de l’aérodrome atis superposées à l’onde porteuse un vor de test vot est une balise de très faible puissance installée sur les aérodromes elle émet un déphasage constant de zéro dans toutes les directions cela permet aux aéronefs de tester la précision de leur équipement au sol la fonction de test vor est sélectionnée avec un cap de 000° l'indicateur de déviation de route doit être centré avec l'indication from et le rmi doit indiquer 180° qdm l'identifiant de la balise pour un vor de test est une série de points attention ne confondez pas un tvor avec un vor de test question 623419 la portée maximale à laquelle vous recevrez un signalune indication dépendra de la puissance de l'émetteur de l'altitude de la sensibilité du récepteur des conditions atmosphériques et de divers autres facteurs intangibles la portée théorique maximale en milles nautiques a toujours été calculée ainsi r = 123 h1 + h2 où h1 = altitudehauteur du récepteur en pieds h2 = élévation de l'installation au sol en pieds 111 nm = 123 ft + 169 ft 111 nm = 123 ft + 13 ft ft + 13 = 111 ÷ 123 ft + 13 = 904 ft = 904 – 13 ft = 7724 = 77242 = 5967 = fl60 dvor basse consommation dans la gamme de fréquences 112 mhz – 118 mhz. test vor transmettant un signal tel que le signal de référence et le signal variable soient toujours en phase. vor haute puissance dans la gamme de fréquences 108 mhz – 112 mhz.
Question 185-25 : Sur un rmi l'extrémité avant d'un pointeur vor indique le ?
Radial plus 180°.
Français se référer à la figure cap la direction dans laquelle l'axe longitudinal d'un aéronef est pointé généralement exprimée en degrés par rapport au nord vrai magnétique compas ou grille route la projection sur la surface de la terre de la trajectoire d'un aéronef la direction de laquelle trajectoire en tout point est généralement exprimée en degrés par rapport au nord vrai magnétique ou grille radial un relèvement magnétique s'étendant à partir d'un vorvortactacan relèvement la direction horizontale vers ou depuis n'importe quel point généralement mesurée dans le sens des aiguilles d'une montre à partir du nord vrai du nord magnétique ou d'un autre point de référence sur 360 degrés cap contre radial le radial donne la position relative d'un aéronef par rapport à un vor par exemple il n'y a pas de relation mathématique entre le radial et le cap ou la route d'un aéronef c'est à dire que l'un ne peut pas être dérivé de l'autre n'oubliez pas que l'aiguille du vor indique où se trouve l'avion radialement par rapport à la station la pointe de la flèche indique le qdm du vor relèvement vers la station vor tandis que l'autre extrémité indique le qdr ou radial vor sur lequel l'avion est positionné à ce moment là Relèvement magnétique de la station. radial. relèvement relatif.
Question 185-26 : Quelle affirmation concernant l'interrogatoire par l'interrogateur dme est correcte ?
L'interrogation ne démarre pas avant que les paires d'impulsions de la station dme réglée soient reçues.
Le réglage de l'interrogateur dme dans l'avion déclenche la transmission de paires d'impulsions en mode recherche l'interrogateur ne reçoit alors aucune information lorsque les paires d'impulsions sont reçues par le transpondeur de la station sol celui ci ajuste la fréquence d'une valeur prédéterminée de + ou 63 mhz lesquelles sont renvoyées et reçues par l'interrogateur c'est seulement maintenant qu'une boucle fermée se forme entre l'interrogateur et le transpondeur logiquement on ne peut interroger un objet sans avoir préalablement établi une communication avec cet objet par conséquent une simple transmission en mode recherche ne peut être considérée comme une interrogation la boucle doit d'abord être fermée pour vérifier la présence d'un transpondeur à interroger l'interrogation commence directement après que la fréquence dme correcte a été sélectionnée sur le panneau de sélection de fréquence par le pilote. l'interrogation commence lorsque l'interrogateur est suffisamment réchauffé, que des paires d'impulsions soient reçues ou non. l'interrogation ne peut avoir lieu que si le circuit de protection contre l'écho a été verrouillé.
Question 185-27 : Un avion est en approche nav 1 étant réglé sur la fréquence ils et nav 2 sur la fréquence vor qui permet également une approche vers la même piste lorsque le cdi de nav 1 est à sa pleine déviation le cdi de nav 2 affiche environ… ?
Déviation d'un quart d'échelle.
Voir la figure les vor et les ils utilisent souvent les mêmes affichages dans le cockpit l'affichage latéral du cdi indicateur d'écart de cap permet d'afficher l'écart du vor ou du localisateur et l'affichage vertical celui de la trajectoire de descente cependant leur précision n'est pas la même car un localisateur doit être bien plus précis qu'un vor ainsi sur un cdi standard à 5 points les vor ont un écart de 2 degrés par point soit une déviation maximale de 10° par rapport au relèvement sélectionné les localisateurs ils loc quant à eux n'ont qu'un écart de 05 degré par point soit une déviation maximale de 25° par rapport à l'axe du localisateur par conséquent dans ce scénario où nous sommes exactement à la déviation maximale du loc nous sommes à 25° de la trajectoire de rapprochement correcte soit un quart de la déviation maximale affichée sur l'écran du vorDéviation à demi-échelle. déviation à pleine échelle. aucune déviation.
Question 185-28 : Le mls est principalement installé dans les aéroports où ?
L'ils rencontre des difficultés en raison des bâtiments environnants etou du terrain ou des interférences des stations de musique locales.
Le système d'atterrissage micro ondes mls a été conçu pour remplacer l'ils par un système d'approche de précision avancé capable de pallier ses inconvénients et d'offrir une plus grande flexibilité à ses utilisateurs cependant peu d'installations mls sont actuellement en service et leur coexistence avec l'ils est probable pendant longtemps le mls est un système d'approche et d'atterrissage de précision qui fournit des informations de position et diverses données sol air ces informations de position fournies sur un large secteur de couverture sont déterminées par une mesure d'angle d'azimut une mesure d'élévation et une mesure de distance le mls permet d'interrompre le signal transmis pour éviter toute réflexion par des objets fixes tels que des obstacles sur la trajectoire d'approche ce qui le rend moins sensible à la situation géographique et aux obstacles cet avantage ainsi que son coût relativement faible constituent ses principaux avantages parmi les avantages secondaires on peut citer la possibilité pour les avions équipés du mls d'emprunter des trajectoires d'approche autres que directes et l'utilisation d'une seule fréquence évitant ainsi le besoin d'appairage de fréquences les conditions météorologiques sont susceptibles de provoquer une conduction de l'ils par super-réfraction. les principaux chemins d'accès mènent au-dessus de l'eau. les conditions topographiques empêchent l'installation de balises ils.
Question 185-29 : Concernant l'adf et le ndb ?
Le ndb est un équipement terrestre et l'adf est un équipement aéroporté.
Les ndb sont des balises non directionnelles qui émettent une onde porteuse simple avec une modulation se superposant à l'identifiant en code morse il s'agit d'une station au sol composée d'une seule antenne pour la transmission l'adf automatic direction finder est l'équipement du cockpit qui mesure la direction d'où provient le signal de l'onde porteuse du ndb et pointe une aiguille directement vers le ndb concerné sur l'un des instruments du pilote les ndb fonctionnent entre 190 et 1750 khz couvrant les bandes de fréquences lf basse fréquence 30 300 khz et mf moyenne fréquence 300 3000 khz l'adf est un équipement civil tandis que le ndb est un équipement militaire également utilisé par les civils. l'adf est un équipement terrestre et le ndb peut être un équipement terrestre ou un équipement aéroporté. le ndb est un localisateur et l'adf est une aide à la navigation en route.
Question 185-30 : L'indication adf dans le cockpit est un ?
Relèvement relatif sur un indicateur de carte fixe.
Voir la figure l'indication de l'adf sur une carte fixe à l'intérieur du cockpit est un rbi indicateur de relèvement relatif le rbi est mesuré dans le sens des aiguilles d'une montre à partir du nez de l'avionIndicateur de palier magnétique sur carte fixe incidence relative sur un rmi véritable relèvement sur un rmi
Question 185-31 : L'effet de nuit dans un adf peut provoquer ?
Indications fluctuantes de l'aiguille sur le rmi.
De jour la région d absorbe les signaux dans les bandes bf et mf la nuit elle disparaît ce qui entraîne une contamination de l'onde de surface par l'onde d'espacece phénomène est dû à l'interférence de phase entre l'onde d'espace et l'onde de surface due aux trajets différents et à l'induction de courants dans les éléments horizontaux de l'antenne cadrecet effet se manifeste par un affaiblissement du signal audio et une fluctuation de l'aiguille rmi particulièrement importante à l'aube et au crépuscule lorsque l'ionosphère est en transitionBruit dans l'onde électromagnétique reçue, qui sera à peine remarqué par le pilote regardant le rmi. aucune erreur de roulement grâce à l'unité de compensation intégrée. une erreur constante dans le relèvement indiqué.
Question 185-32 : Quelle affirmation est correcte concernant les différents types de vor ?
Un tvor a une portée limitée.
Applications vor les vor sont utilisés pour la navigation en route généralement pour définir les axes des voies aériennes la précision globale requise pour l’affichage des informations est de ± 5° lors du premier tracé des voies aériennes européennes une précision inférieure de ± 75° était supposée pour maintenir un aéronef dans les limites d’une voie aérienne de 10 nm la distance maximale entre les balises a été calculée à 80 nm les vor peuvent être classés comme suit un vor terminal tvor est une balise de faible puissance utilisée dans le cadre d’une approche d’aérodrome les tvor partagent les fréquences plus basses avec l’ils un vor de diffusion est généralement une aide terminale avec une diffusion vocale diffusant les informations météorologiques de l’aérodrome atis superposées à l’onde porteuse un vor de test vot est une balise de très faible puissance installée sur les aérodromes elle émet un déphasage constant de zéro dans toutes les directions cela permet aux aéronefs de tester la précision de leur équipement au sol la fonction de test vor est sélectionnée avec un cap de 000° l'indicateur d'écart de route doit être centré avec l'indication de et le rmi doit indiquer 180° qdm l'identification de la balise d'un vor d'essai est une série de points un dvor est moins précis qu'un cvor. un cvor est principalement utilisé pour les approches aux instruments. un vot est situé le long d'une voie aérienne dans le but de fournir un contrôle en vol de l'équipement embarqué.
Question 185-33 : Lors d'une approche ils lorsque vous survolez le marqueur central la couleur du feu clignotant sera ?
Ambre.
Français voir la figure il existe trois types de marqueurs installés dans le cadre d'un système d'atterrissage aux instruments ils marqueur extérieur om ce marqueur indique normalement le repère d'approche finale faf il est situé entre 4 et 7 nm du seuil de piste sur la même trajectoire que le localizer lors du passage du marqueur extérieur le pilote reçoit une tonalité audio en série continue de 400 hz accompagnée d'un feu bleu clignotant dans une série continue de tirets de 2 secondes marqueur central mm ce marqueur indique normalement le point d'approche interrompue cat i et il est positionné entre 05 et 08 nm du seuil de piste lors du passage du marqueur central le pilote reçoit une tonalité audio en série continue à 1300 hz accompagnée d'un feu orange clignotant dans une séquence alternée de points et de tirets marqueur intérieur im ce marqueur indique normalement le passage du seuil de piste lors du passage du marqueur intérieur le pilote reçoit une tonalité audio en série continue de 3000 hz accompagnée d'un feu blanc clignotant dans une séquence de pointsBleu. vert. blanc.
Question 185-34 : Lors d'une approche ils lorsque vous survolez le marqueur intérieur si disponible la couleur du feu clignotant sera ?
Blanc.
Français voir la figure il existe trois types de marqueurs installés dans le cadre d'un système d'atterrissage aux instruments ils marqueur extérieur om ce marqueur indique normalement le repère d'approche finale faf il est situé entre 4 et 7 nm du seuil de piste sur la même trajectoire que le localizer lors du passage du marqueur extérieur le pilote reçoit une tonalité audio en série continue de 400 hz accompagnée d'un feu bleu clignotant dans une série continue de tirets de 2 secondes marqueur central mm ce marqueur indique normalement le point d'approche interrompue cat i et il est positionné entre 05 et 08 nm du seuil de piste lors du passage du marqueur central le pilote reçoit une tonalité audio en série continue à 1300 hz accompagnée d'un feu orange clignotant dans une séquence alternée de points et de tirets marqueur intérieur im ce marqueur indique normalement le passage du seuil de piste lors du passage du marqueur intérieur le pilote reçoit une tonalité audio en série continue de 3000 hz accompagnée d'un feu blanc clignotant dans une séquence de pointsBleu. vert. ambre.
Question 185-35 : En approche finale ils vous survolez la balise extérieure attendez vous à être à ?
A 4 nm du seuil.
Il existe trois types de balises installées dans le cadre d'un système d'atterrissage aux instruments ils la balise extérieure om indique normalement le repère d'approche finale faf elle est située entre 4 et 7 nm du seuil de piste sur la même trajectoire que le localizer lors du passage de la balise extérieure le pilote reçoit une tonalité audio continue de 400 hz accompagnée d'un feu bleu clignotant en séquence continue de tirets de 2 secondes la balise intermédiaire mm indique normalement le point d'approche interrompue cat i et est située entre 05 et 08 nm du seuil de piste lors du passage de la balise intermédiaire le pilote reçoit une tonalité audio continue à 1 300 hz accompagnée d'un feu orange clignotant en séquence alternée de points et de tirets la balise intérieure im indique normalement le passage du seuil de piste lors du passage de la balise intérieure le pilote reçoit une tonalité audio continue de 3 000 hz accompagnée d'un feu blanc clignotant en séquence de points a 10 nm du seuil. 1 nm du seuil. a 25 nm du seuil.
Question 185-36 : La bande uhf est la bande de fréquences attribuée au ?
émetteur de trajectoire de descente ils.
Voir la figure comme le montre la figure l'ultra haute fréquence uhf est avec plusieurs autres attribuée à l'émetteur de trajectoire de descente de l'ils les 3 balises de marquage ils. balise de balisage extérieure. émetteur de localisation ils.
Question 185-37 : Les émetteurs ils utilisent ?
Bandes uhf et vhf.
Les principaux composants de l'ils sont le localisateur le réseau d'antennes au sol du localisateur loc est situé sur l'axe longitudinal de la piste aux instruments d'un aéroport suffisamment éloigné de l'extrémité opposée d'approche de la piste pour éviter tout risque de collision cette unité émet un diagramme de champ qui développe une trajectoire le long de l'axe de la piste vers les marqueurs intermédiaires mm et extérieurs om puis une trajectoire similaire le long de l'axe de la piste dans la direction opposée ces trajectoires sont respectivement appelées trajectoires avant et arrière le localisateur fournit un guidage de trajectoire transmis entre 1081 et 11195 mhz aux dixièmes impairs seulement tout au long de la trajectoire de descente jusqu'au seuil de piste depuis une distance de 18 nm de l'antenne jusqu'à une altitude de 4 500 pieds au dessus de l'altitude du site de l'antenne la trajectoire du localisateur est très étroite généralement de 5° ce qui confère à l'aiguille une grande sensibilité avec cette largeur de trajectoire une déviation à pleine échelle est visible lorsque l'avion se trouve à 25° de chaque côté de l'axe central cette sensibilité permet une orientation précise par rapport à la piste d'atterrissage avec une déviation ne dépassant pas un quart de l'échelle l'avion sera aligné avec la piste plan de descente le plan de descente gs décrit les systèmes qui génèrent reçoivent et indiquent le diagramme de rayonnement des installations au sol la trajectoire de descente est la ligne droite et inclinée que l'avion doit suivre lors de sa descente depuis l'intersection de la trajectoire de descente avec l'altitude d'approche du faf jusqu'à la zone de toucher des roues de la piste l'équipement de l'alignement de descente est hébergé dans un bâtiment situé à environ 230 à 380 mètres en aval de l'extrémité d'approche de la piste et entre 120 et 180 mètres d'un côté de l'axe central la trajectoire projetée par l'équipement de l'alignement de descente est sensiblement la même que celle générée par un radiophare d'alignement de piste fonctionnant de son côté l'angle de projection de l'alignement de descente est normalement réglé entre 25° et 35° au dessus de l'horizontale de sorte qu'il croise le mm à environ 200 pieds et l'om à environ 1 400 pieds au dessus de l'altitude de la piste aux endroits où le franchissement minimal standard des obstacles ne peut être obtenu avec l'angle d'alignement de descente maximal normal l'équipement d'alignement de descente est déplacé plus loin de l'extrémité d'approche de la piste si la longueur de la piste le permet ou l'angle d'alignement de descente peut être augmenté jusqu'à 4° balises de balisage toutes les balises fonctionnent sur la fréquence vhf 75 mhz le pilote n'a donc pas besoin de sélectionner de fréquence et émettent un faisceau en éventail donnant au pilote une indication de la distance par rapport au seuil le but des balises est de fournir des informations de distance pendant l'approche elles émettent un faisceau presque vertical presque toutes les installations sont équipées d'une balise extérieure et d'une balise centrale les ils de catégorie 2 ou 3 peuvent également être équipés d'une balise intérieure des signaux sonores et visuels dans le cockpit indiqueront le passage de l'avion dans de nombreuses installations les balises de repérage sont remplacées ou complétées par l'utilisation d'un dme associé à l'ils bandes vhf, uhf et hf. bande vhf uniquement. bande uhf uniquement.
Question 185-38 : Les émetteurs de localisation fonctionnent dans une bande de fréquences comprise entre ?
108 mhz et 111975 mhz.
Voir la figure le localisateur ils apparaît en très haute fréquence vhf entre 10810 et 111975 mh108 mhz et 117,975 mhz. 111,975 mhz et 117,975 mhz. 329,15 mhz et 335 mhz.
Question 185-39 : 10835 mhz ne peut être que ?
Une fréquence ils.
La fréquence du localisateur ils se situe dans la bande des très hautes fréquences vhf entre 10810 et 11195 mhz le vor se situe dans la bande vhf généralement entre 10800 et 11795 mhz la plage entre 10800 et 11195 mhz est répartie entre l'ils et les vor terminaux un nombre pair à la première décimale correspond à un vor et un nombre impair à un ils par conséquent 10835 mhz correspond à une fréquence ils une fréquence ndb. une fréquence vor. une fréquence atc.
Question 185-40 : Quelle affirmation concernant les adf est correcte ?
Les adf peuvent recevoir et prendre des relèvements sur n'importe quelle station de radiodiffusion émettant dans la bande de fréquences 190 – 1750 khz.
Voir la figure comme le montre la figure l'adf fonctionne dans les bandes de fréquences basses bf et moyennes mf plus précisément l'adf est capable de recevoir des relèvements entre 190 et 1750 khzLes adf ne peuvent pas recevoir les stations de radiodiffusion émettant dans la bande de fréquences 190 – 1750 khz car les ndb sont modulés en amplitude et non en fréquence comme les stations de radiodiffusion. les adf peuvent recevoir n'importe quelle station de radiodiffusion émettant dans la bande de fréquences 190 – 1750 khz, mais ne peuvent pas prendre de relèvement sur elles. les adf ne peuvent pas recevoir les stations de radiodiffusion émettant dans la bande de fréquences 190 – 1750 khz car les ndb sont modulés soit en n0n/a1a soit en a2a et non en a3e comme les stations de radiodiffusion.
Droits exclusifs réservés. Reproduction interdite sous peine de poursuites.