Un compte Premium offert sur le site FCL.055 ! Lire ici
17 membres en ligne en ce moment. Rejoignez-les pour consulter nos 15164 questions (20 mises à jour AUJOURD'HUI)
Question 194-1 : Certains des avantages du radar de surveillance secondaire ssr par rapport au radar primaire sont que le ssr 1 et a une portée plus longue car 2 ? [ Niveau sécurité ]
1 collecte plus de données 2 de la participation active du transpondeur de l'avion
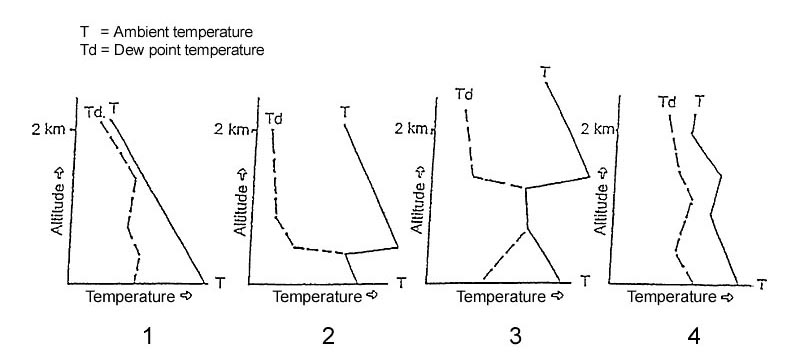
Question 194-2 : L'inclinaison d'un radar météorologique aéroporté est réduite lors de la recherche d'orages en vol de croisière à haute altitude pourquoi ?
La plus grande réflectivité provient de la grêle humide et de la pluie ces éléments se trouvant généralement dans les niveaux inférieurs d'un orage.
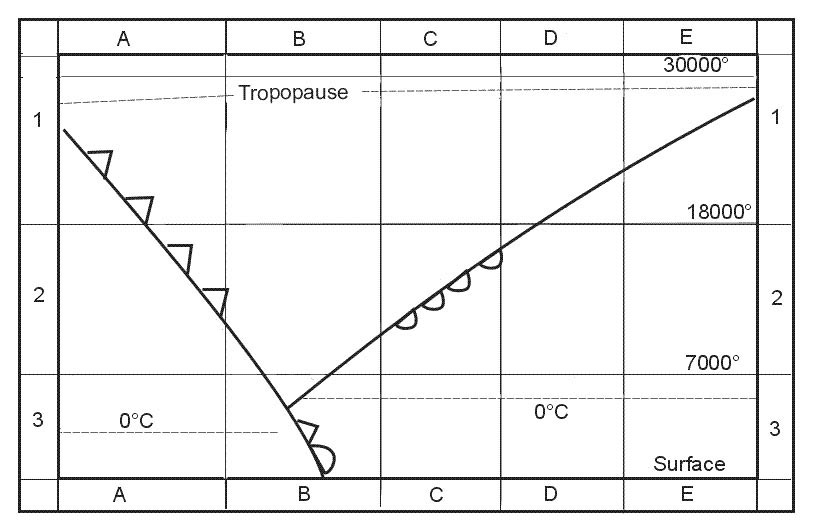
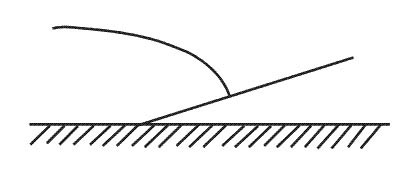
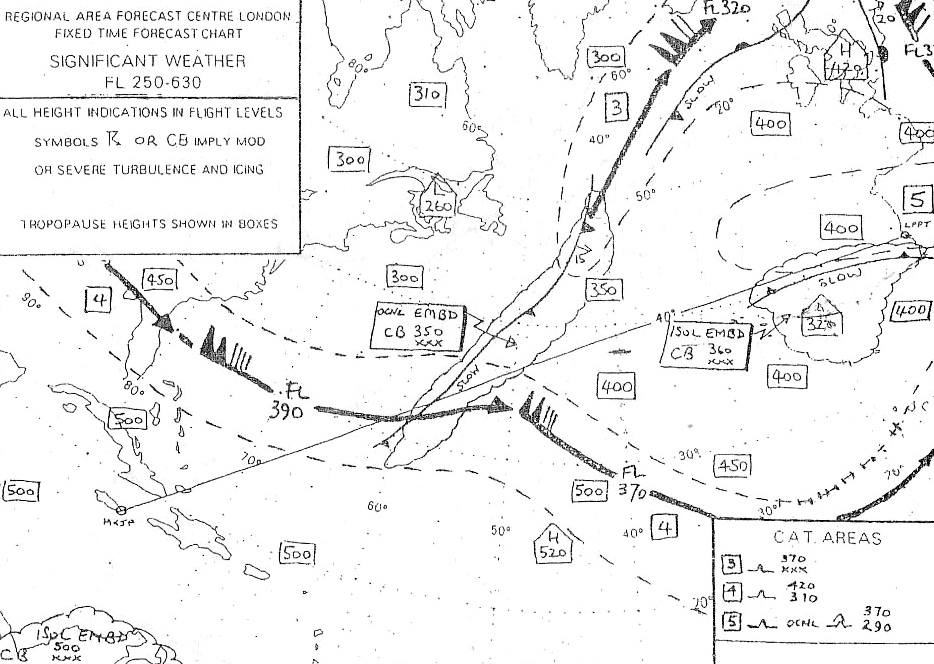
Français se référer à la figure los 06203030502 décrire les réglages d'inclinaison appropriés en fonction de l'altitude et des orages radar météo aéroporté un radar météorologique aéroporté est conçu pour éviter les intempéries et non pour les pénétrer l'awr détecte les gouttes de précipitations telles que la pluie et la grêle humide à haute altitude une cellule orageuse peut contenir des particules de glace à faible réflectivité si le réglage d'inclinaison n'est pas correct le nd peut n'afficher que la partie supérieure moins réfléchissante de la cellule orageuse surbalayage par conséquent l'équipage de conduite peut sous estimer ou ne pas détecter une cellule orageuse du tout le pilote maintient normalement l'inclinaison entre 0º et 05º vers le bas pendant la croisière à haute altitude cependant s'il y a un orage devant le pilote voudra réduire l'inclinaison de manière significative environ 5º vers le bas pour voir où se trouve la partie la plus grave de la tempête et quelle est la gravité du coeur de la tempête utilisation du radar météorologique en fonction de la phase de vol phase de vol contrôle de l'inclinaison roulage loin du personnel au sol réglez le nd sur la plage la plus basse en règle générale réglez le à 15º vers le haut décollage en cas de suspicion de conditions météorologiques défavorables inclinez manuellement et progressivement vers le haut pour scanner la météo maximum 15º vers le haut dans tous les autres cas réglez l'inclinaison à 4º vers le haut montée ajustez la plage du nd selon les besoins et diminuez l'angle d'inclinaison à mesure que l'avion monte en général réglez l'inclinaison de 5º à 7º vers le haut initialement puis réduisez la progressivement avec l'altitude vol en paliercroisière ajustez la plage du nd selon les besoins modifiez régulièrement l'inclinaison pour scanner la météo devant l'avion une fois le balayage météorologique terminé ajustez l'inclinaison de sorte que les retours de sol apparaissent en haut du nd à haute altitude l'inclinaison est réglée entre 0º et 05º sauf en cas de conditions météorologiques défavorables descente réglez l'inclinaison à environ 5º vers le haut approche réglez l'inclinaison à 4º vers le haut ce qui empêche l'affichage de trop de retours au solLa plus grande réflectivité provient de la grêle sèche et de la neige, ces éléments se trouvant principalement dans les niveaux inférieurs d'un orage. les encombrements au sol sont plus évidents et donc moins susceptibles d'être confondus avec une activité orageuse. l'encombrement au sol améliore l'affichage en augmentant automatiquement le gain et en augmentant la probabilité de détecter une activité orageuse.
Question 194-3 : Que s'affiche l'écran radar atc lorsque le pilote appuie sur le bouton d'identification de position spéciale spi du transpondeur ?
Une indication clignotante de l'avion qui est squawking ident .
Objectif d'apprentissage 06203040207 préciser qu'en plus des informations fournies sur demande de l'atc une impulsion d'identification de position spéciale spi peut être transmise mais uniquement par sélection manuelle du pilote bouton ident le pilote peut transmettre manuellement une impulsion d'identification de position spéciale spi en appuyant sur le bouton ident de son transpondeur l'avantage de la fonction de transpondeur ident est l'identification manuelle de l'aéronef le contrôleur peut demander ident via la fréquence de communication radio en cas de doute sur l'identification de l'aéronef sur son écran dès l'acquisition de l'impulsion spi l'indication de l'aéronef concerné commence à clignoter sur l'écran du contrôleur cela produit un affichage distinctif permettant au contrôleur de repérer un aéronef en particulier en demandant au pilote de transmettre l'identification c'est l'un des nombreux moyens dont disposent les contrôleurs pour relier un aéronef sur la fréquence à un autre sur leur écran radar remarque cette question a été créée à partir de commentaires incomplets donc toute information supplémentaire notamment sur les 4 options serait utile pour affiner la question merci une indication clignotante de tous les avions qui ne sont pas « squawking ident ». le retrait de cet avion de l'affichage radar. une indication clignotante de tous les avions sur l'écran radar.
Question 194-4 : Quelle est l’utilisation principale du radar installé à bord d’un avion de transport civil moderne ?
Détection des zones de temps humide et convectif.
Le radar a de nombreuses utilisations dans le monde en aviation le radar primaire peut servir à repérer les avions et la météo mais en vol les avions l'utilisent généralement uniquement pour obtenir des informations météorologiques c'est pourquoi tous les gros porteurs sont équipés d'un radar météorologique aéroporté le radar météorologique aéroporté awr installé sur les gros porteurs utilise un radar primaire pour détecter les réflexions des précipitations dans les nuages plus les précipitations sont importantes et humides meilleure est la réflectivité et plus les retours sont forts la grêle humide donne les meilleurs retours tandis que les cristaux de glace et la neige sèche ne donnent pas de bons retours radar les retours forts sont indiqués en rouge les plus faibles en vert et les jaunes au milieu parfois le magenta est utilisé pour indiquer les zones de turbulence le temps convectif se caractérise par des précipitations plus importantes et plus humides ce qui génère des retours radar plus forts le radar fonctionne comme tout autre radar à impulsions il pointe dans une direction particulière et émet une impulsion de rayonnement électromagnétique dans la bande des micro ondes puis attend une réponse des réflexions potentielles dans cette zone il mesure ensuite le temps d'arrivée de la réflexion et l'utilise pour calculer la distance par rapport à la cible les impulsions se propageant à la vitesse de la lumière la détection de collision comme le tcas est généralement assurée par un radar secondaire avec des impulsions et des réponses plutôt que des réflexions transmission de données à l'atc à des fins de surveillance. détection d'autres avions. fournit l'entrée principale à un système anticollision.
Question 194-5 : Le radar a de nombreuses applications dans l'aviation civile à quelles tâches le radar primaire et le radar secondaire sont ils utilisés ?
Pour que l'atc assure le suivi des aéronefs et gère le trafic dans un espace aérien donné.
Remarque cette question porte sur les radars primaire et secondaire et non sur l'un d'eux mais sur les cas où les deux sont utilisés objectif d'apprentissage 06203010101 nommer les différentes applications du radar en ce qui concerne le contrôle du trafic aérien atc les observations météorologiques et le radar météorologique aéroporté awr le radar est un outil incroyablement utile pour l'aviation et est utilisé sous de nombreuses formes pour de multiples tâches différentes dans l'aviation civile pour commencer il est divisé en radar primaire et secondaire le radar primaire est un radar où un émetteur récepteur envoie des impulsions ou des ondes électromagnétiques qui sont réfléchies par des éléments de l'environnement vers l'émetteur récepteur et le temps de trajet aller retour vers l'objet est mesuré ce qui donne une indication de sa portée le radar balaie dans les deux sens pour déterminer la direction de l'objet et ce faisant obtient une direction et une distance ce qui permet de tracer sa position sur un écran le radar secondaire est un radar où un interrogateur envoie un signal d'interrogation les transpondeurs captent ce signal puis renvoient un signal de réponse ce signal est utile car il peut transmettre davantage d'informations telles que les codes transpondeurs et les altitudes comme c'est le cas pour le ssr radar de surveillance secondaire l'atc peut utiliser le radar primaire pour suivre les avions et la météo et le radar secondaire pour suivre les avions et obtenir des informations supplémentaires sur un avion ssr les pilotes peuvent utiliser le radar primaire pour suivre la météo et naviguer radar météo aéroporté ainsi que le radioaltimètre et peuvent utiliser le radar secondaire pour détecter d'autres avions afin d'éviter les collisions acastcas ainsi que pour le dme qui est techniquement un système radar secondaire l'avion étant l'interrogateur pour que le pilote puisse naviguer et éviter les zones de météo importante. pour que l'atc réduise la charge de travail du pilote en prenant en charge la tâche de navigation. pour que le pilote puisse détecter d'autres avions et réduire le risque de collision.
Question 194-6 : Un transpondeur mode s sait qu'il reçoit des interrogations d'un interrogateur terrestre mode s car ?
Des impulsions supplémentaires sont transmises directement après les impulsions mode a et mode c.
Le mode s ne transmet pas l'impulsion p3 mais possède une impulsion p4 supplémentaire un transpondeur sans mode s ignorera les impulsions p4 ces impulsions peuvent être longues ou courtes l'interrogation générale en mode acs déclenche une réponse en mode a ou en mode c selon l'espacement des impulsions p1 p3 de la part d'un transpondeur en mode ac car il ne reconnaît pas l'impulsion p4 un transpondeur en mode s reconnaît la longue impulsion p4 et répond par une réponse en mode s annexe 10 de l'oaci télécommunications aéronautiques chapitre 3 cela signifie qu'un transpondeur en mode s transmet ou reçoit des impulsions supplémentaires après les impulsions des transpondeurs en mode a et en mode c l'interrogateur au sol transmettra des impulsions supplémentaires une fois qu'il aura reçu la réponse initiale du transpondeur aéroporté. l'interrogateur au sol transmet les mêmes impulsions pour tous les modes, mais pour le mode s, les impulsions sont plus fortes. seules les impulsions spécifiques au mode s sont transmises par l'interrogateur au sol.
Question 194-7 : Le pilote reçoit un incrément d'altitude de 25 pieds à quel mode ssr cela s'applique t il ?
Mode s.
Performances verticales le mode c fournit des informations sur l'altitude pression en plus des informations d'identification et de position par rapport au mode a le message du transpondeur est transmis par incréments de 100 pieds ce qui doit être pris en compte par l'atc en termes de séparation verticale le mode s offre des performances nettement supérieures au mode c pour la mise à jour des données d'altitude auprès du contrôleur l'altitude peut être transmise avec une précision de 25 pieds mode a mode c mode a et c
Question 194-8 : Un radar de surveillance primaire psr est capable de calculer un ?
Position bidimensionnelle en mesurant le relèvement et le temps de parcours du signal d'interrogation.
Voir la figure radar de surveillance primaire psr le radar de surveillance primaire psr fonctionne en émettant des impulsions d'ondes radio depuis une antenne rotative lorsque ces impulsions rencontrent un avion ou un objet une partie de l'énergie est réfléchie vers l'antenne le psr utilise un système de coordonnées polaires pour fournir des informations sur les cibles détectées il calcule la portée qui est la distance oblique de l'antenne à la cible et le relèvement qui est déterminé par l'azimut de l'antenne portée la portée est déterminée en comparant le temps nécessaire à l'émission et à la réception de l'impulsion en utilisant la vitesse de la lumière comme vitesse de propagation il est important de noter que la portée fournie n'est pas la distance horizontale mais la distance oblique de l'antenne à la cible orientation la mesure de l'orientation est réalisée selon le principe du projecteur cela consiste à concentrer les impulsions radio en faisceaux étroits ce qui peut être réalisé en raccourcissant la longueur d'onde ou en augmentant la taille de l'antenne dans les systèmes avancés cela se fait électroniquement le faisceau étroit est ensuite mis en rotation à une vitesse constante lorsqu'un écho est reçu la direction de l'objet est déterminée en fonction de la direction du faisceau au moment de la réception cette direction est mesurée à partir d'un point de référence fixe le radar de surveillance primaire psr calcule le relèvement et la distance différence de temps d'une cible fournissant ainsi une position bidimensionnellePosition unidimensionnelle en mesurant le relèvement du signal d'interrogation. position en quatre dimensions en mesurant le relèvement, le temps de parcours, la hauteur et le temps du signal d'interrogation. position tridimensionnelle en mesurant le relèvement, le temps de trajet et la hauteur du signal d'interrogation.
Question 194-9 : Un radar de surveillance de route primaire fournit ?
Direction par mesure de l'azimut de l'antenne portée par déplacement du signal dans le temps pas d'altitude.
Voir la figure radar de surveillance primaire psr le radar de surveillance primaire psr fonctionne en émettant des impulsions d'ondes radio depuis une antenne rotative lorsque ces impulsions rencontrent un avion ou un objet une partie de l'énergie est réfléchie vers l'antenne le psr utilise un système de coordonnées polaires pour fournir des informations sur les cibles détectées il calcule la portée qui est la distance oblique entre l'antenne et la cible et le relèvement qui est déterminé par l'azimut de l'antenne portée la portée est déterminée en comparant le temps nécessaire à l'émission et à la réception de l'impulsion en utilisant la vitesse de la lumière comme vitesse de propagation il est important de noter que la portée fournie n'est pas la distance horizontale mais la distance oblique entre l'antenne et la cible orientation la mesure de l'orientation dans les systèmes radar utilise le principe du projecteur où les impulsions radio sont focalisées en faisceaux étroits cela peut être réalisé en réduisant la longueur d'onde ou en agrandissant électroniquement l'antenne dans les systèmes avancés le faisceau étroit est ensuite tourné à une vitesse constante en analysant la direction de l'écho reçu le relèvement de l'objet peut être déterminé grâce à l'azimut de l'antenne au moment de la réception cette information directionnelle est mesurée à partir d'un point de référence fixe le radar de surveillance primaire psr calcule le relèvement azimut de l'antenne et la distance temps de trajet du signal d'une cible fournissant ainsi une position bidimensionnelle l'altitude n'est pas fournieCode transpondeur à 4 chiffres, pas de direction, pas de portée, pas d'altitude. altitude par angle d'élévation, direction par angle d'azimut de l'antenne, pas de portée. portée en interrogeant le transpondeur dme, altitude en interrogeant le transpondeur mode-c, direction aucune.
Question 194-10 : Un transpondeur mode s fonctionnel interrogé en mode a qu'est ce qui est fourni à l'écran atc en dehors de la position de l'avion relèvement et distance ?
Code transpondeur uniquement.
L'avion est interrogé depuis la station sol par une série prédéterminée d'impulsions sur la fréquence porteuse de 1030 mhz son transpondeur transmet ensuite une réponse codée sur la fréquence porteuse de 1090 mhz les modes de fonctionnement sont les suivants mode a interrogation pour identifier un avion mode c interrogation pour obtenir une lecture automatique de la hauteur d'un avion référencé à 1013 hpa mode s évolution du ssr de base entièrement compatible avec les unités conventionnelles des modes a et c offrant une liaison de données air sol sol air et air air ainsi qu'une lecture de la hauteur par incréments de 25 ft mode s adressage sélectif permet l'échange de données via des protocoles de communication la liaison de données mode s peut servir de méthode alternative ou complémentaire pour divers services atc traditionnellement assurés par communications vocales vhf cette utilisation de la technologie de liaison de données améliore la sécurité et la fiabilité du système atc en minimisant les erreurs associées aux communications vocales de nombreux types de messages et de services au sein de l'atc peuvent bénéficier d'une sauvegarde de liaison de données comme identification du vol confirmation d'autorisation d'altitude confirmation d'autorisation de décollage nouvelle fréquence de communication pour le transfert de secteur accusé de réception par le pilote de l'autorisation atc transmission au sol des paramètres de vol de l'avion avertissement d'altitude minimale de sécuritéun transpondeur mode s est entièrement compatible avec les unités au sol conventionnelles modes a et c cela signifie que si un transpondeur mode s est interrogé en mode a le transpondeur répond comme s'il était réglé en mode a fournissant l'identification de l'avion code transpondeur à l'écran radar de l'atc code transpondeur et altitude pression. code du transpondeur, altitude pression et adresse de l'avion. code du transpondeur, altitude pression, adresse de l'avion et autres données de vol.
Question 194-11 : Dans un système de navigation par satellite gnss gps la position d'un aéronef est calculée par ?
La mesure du temps mis par un nombre minimum de transmissions provenant de satellites ces satellites étant en des positions connues pour atteindre le récepteur de l'aéronef.
La mesure de la longueur de pulsation de signaux reçus de satellites dans un ordre séquentiel spécifique. la mesure du temps mis par la transmission émise par l'aéronef pour aller jusqu'à des satellites et revenir (ces satellites étant en des positions connues). la mesure par le récepteur de l'aéronef, de l'angle de phase de signaux reçus de satellites (ces satellites étant en des positions connues).
Question 194-12 : Quel est le nombre minimal de satellites navstargps nécessaire pour calculer une position en 3 dimensions indépendante ?
4.
Pour réaliser une opération tridimensionnelle 3d 4 satellitespour réaliser une opération bidimensionnelle 2d 3 satellites24. 3. 5.
Question 194-13 : Les satellites gps transmettent sur 2 fréquences en bande l avec différents types de signauxparmi les choix ci dessous lequel est généralement disponible pour l'aviation civile ?
Fréquence l1 acquisition brute ca ou 'coarse acquisition' avec dégradation possible du signal sa ou 'selective availability' .
Fréquence l2 - acquisition brute (c/a ou 'coarse acquisition'). fréquence l1- précise (p ou 'precision'). fréquence l2 - pour des buts de communication.
Question 194-14 : Quel système de référence est utilisé par le récepteur navstargps pour déterminer la position latitude longitude et altitude ?
Wgs 84.
Ed 87. ed 50. pz 90.
Question 194-15 : La réception simultanée de 4 satellites permet de déterminer ?
L'heure la latitude la longitude l'altitude.
L'heure et l'altitude. l'heure, la latitude et la longitude. la latitude, la longitude, l'altitude.
Question 194-16 : La bande de fréquence utilisée par un système de navigation assisté par satellite gnssgps pour fournir une information de position à un aéronef civil est ?
Uhf.
Les satellites du système gps transmettent leurs signaux sur deux fréquences de 1575 mhz et 1227 mhzvor operating frequencies vhflocaliser vhfmarker beacon vhfdme operating frequencies uhfglide slope uhfgnssgps uhffréquences l1 et l2 utilisées par le système navstargps uhfils localiser et glide slope respectivement vhf et uhfmicrowave landing system mls shfairborne weather radars shflocator lfmfShf. ehf. vhf.
Question 194-17 : Quel est le nombre minimum de satellites pour qu'un système gnssgps effectue une opération en deux dimensions ?
3.
24 5. 2.
Question 194-18 : Si on néglige la longueur de l'impulsion la frequence maximale de repétition des impulsions qui peut être utilisée par un radar primaire pour détecter des cibles sans ambiguité avec une distance de 200 nm est ?
405 impulsions par seconde.
Portée en km = c 2fc2f = 200nm c = vitesse de la lumière 162000 nmsec 2f = 1620002002f = 810f = 405782 impulsions par seconde. 308 impulsions par seconde. 810 impulsions par seconde.
Question 194-19 : Quelle proposition contient la liste des erreurs affectant les performances d'un système de navigation assisté par satellite gnssgps ?
Erreur d'horloge erreur d'éphéméride erreur de propagation atmosphérique.
Interférences entre satellites, décalage de fréquence, décalage de temps entre le satellite et le sol. interférences entre satellites, erreur d'éphéméride, erreur de propagation atmosphérique. décalage de temps entre le satellite et le sol, erreur de propagation atmosphérique, erreur d'horloge.
Question 194-20 : Un système raim receiver autonomous integrity monitoring détectant et excluant le satellite défecteux du calcul de position gps nécessite de recevoir des signaux provenant d'un nombre minimal de satellites afin de calculer une position à trois dimensions de façon autonomequel est ce nombre ?
6.
7. 5. 4.
Question 194-21 : La réception de signaux provenant d'un nombre minimal de satellites qui ont une élévation correcte et une position utilisable pour une navigation indépendante en 3 dimensions cela sans surveillance de l'intégrité récepteur receiver autonomous integrity monitoring raim est nécessaire en vue ?
4.
6. 5. 3.
Question 194-22 : La distance entre un satellite navstargps et un recepteur gps est ?
Déterminée en multipliant le temps mis par le signal pour aller du satellite au récepteur par la vitesse de la lumière.
Calculée à partir du décalage par effet doppler des fréquences connues. calculée en utilsant le système de référence wgs-84, à partir des positions connues du satellite et du récepteur. déterminée en multipliant le décalage de la phase de la séquence pseudo-aléatoire (prn ou pseudo random noise), par la vitesse de la lumière.
Question 194-23 : La distance mesurée entre un satellite du système de localisation navstar gps et un récepteur est appelée une pseudo distance parce que ?
La distance calculée inclut une erreur d'horloge du récepteur.
Nouvelle question décembre 2010La distance calculée est basée sur une orbite de kepler idéale. la distance mesurée est basée sur le code de bruit pseudo aléatoire. le mouvement du satellite ainsi que celui du récepteur durant le calcul de la distance ne sont pas pris en compte.
Question 194-24 : Quel type de récepteur d'un système de navigation navstargps est le plus adapté pour être utilisé à bord des avions ?
Multicanaux.
Il existe deux catégories de récepteurs les récepteurs séquentiels appelés encore multiplexés et les récepteurs à canaux parallèles ou multicanauxles récepteurs séquentiels ne possèdent qu'un seul canal pour la réception des signaux en provenance des divers satellites comme il ne leur est pas possible de recevoir les signaux de plusieurs satellites en même temps ces récepteurs utilisent l'unique canal pour traiter tour à tour les signaux de chaque satellite ce type d'appareil présente plusieurs inconvénients le principal défaut est le manque de sensibilité des récepteurs là où la réception est difficile comme sous le feuillage des arbres ces appareils requièrent également plus de temps au démarrage pour se synchroniser avec les satellites cependant ils présentent quelques avantages ils consomment moins d'énergie que les récepteurs à canaux parallèles ils sont également plus simples et donc assez bon marché on ne trouve que des récepteurs séquentiel d'occasion aujourd'hui dans les cockpits vous n'aurez que des récepteurs à canaux parallèles multicanaux les récepteurs à canaux parallèles multicanaux possèdent plusieurs canaux qui leur permettent de recevoir et de traiter simultanément les signaux provenant de plusieurs satellites la qualité de l'acquisition est bien meilleure que celle des récepteurs séquentielsMultiplex. séquentiels. n'importe quel type de recepteur portatif.
Question 194-25 : L'influence de la ionosphère sur la précision du système de navigation par satellites navstargps est ?
Minimisé par un récepteur utilisant un modèle de l'atmosphère et comparant les signaux transmis sur les fréquences l1 et l2 par les satellites.
Négligeable. minimisée par moyennage de l'ensemble des signaux. uniquement significative lorsque les satellites sont situés à un faible angle d'élévation au-dessus de l'horizon.
Question 194-26 : Quels sont les effets s'il y en a du masquage par l'une des parties de l'aéronef les ailes par exemple de la réception des signaux des satellites navstargps ?
Cela peut empêcher la réception du signal.
Cela n'aura aucune influence car les signaux haute fréquence ne sont pas affectés. le signal subira des distorsions mais pourra néanmoins être corrigé grâce à un algorithme et des informations issues de signaux non affectées. cela peut produire une propagation du type multitrajets (multipath propagation).
Question 194-27 : Parmi les configurations géométriques de satellites gps suivantes laquelle est la plus favorable vis à vis de la précision de positionnement ?
3 satellites à faible élévation au dessus de l'horizon séparés les uns des autres de 120° en azimut plus un quatrième satellite à la verticale du récepteur.
26053 satellites séparés les uns des autres de 120° en azimut, et dont l'élévation sera de 45° au dessus de l'horizon. 4 satellites à faible élévation au dessus de l'horizon et séparés les uns des autres de 90° en azimut. 4 satellites séparés les uns des autres de 90° en azimut, et dont l'élévation sera de 45° au dessus de l'horizon.
Question 194-28 : Pour un système de navigation gpsnavstar que représente la technique différentielle d gps ?
Des stations sol fixes calculent les erreurs de position et transmettent des informations de correction à un recepteur approprié à bord de l'avion.
Les signaux des satellites sont reçus par 2 antennes différentes situées à une distance déterminée l'une de l'autre. ceci permet à un recepteur approprié d'identifier et de coriger les erreurs de multi-trajets. la différence entre les signaux transmis sur les fréquences l1 et l2 est analysée par le récepteur pour déterminer la correction de l'erreur. des récepteurs issus de différent fabricants sont utilisés en parallèle pour réduire l'erreur due au bruit caractéristique du récepteur
Question 194-29 : Quelle affirmation est juste concernant l'exactitude des informations qui peuvent être obtenue avec la technique différentielle d'un système de navigation par satellite navstar gps d gps ?
Plus le récepteur est proche d'une station d gps sol plus la position est exacte.
Pour augmenter la précision du calcul d'une position gps on peut utiliser une station sol en plus des satellites cette option appelée d gps differential gps permet d'apporter plus de précision par rapport au signal l1 civil seull'émetteur de la station sol est situé à un point précis dont la position a été parfaitement calculéelogiquement plus un aéronef sera proche de la station sol plus sa précision gps sera exacteL'augmentation de l'exactitude d'une position fixe est indépendante de la position du récepteur par rapport à une station d-gps au sol. un récepteur d-gps peut détecter et corriger par la fonction “sa” (selective availability) et fournir une position encore plus exacte. seul un d-gps autorise une position suffisamment exacte pour une “approche de non précision”.
Question 194-30 : Comment un récepteur du système de navigation par satellite gps détermine t il le site et l'azimut d'un satellite par rapport à la position de l'antenne ?
Il les calcule en exploitant les données de l'almanach émis par les satellites.
Les données sont mémorisées dans le récepteur avec le code prn (pseudo random noise). les données sont basées sur la direction du satellite, mesurée à partir de l'emplacement de l'antenne. les données sont calculées par le satellite, puis transmises avec le message de navigation.
Question 194-31 : Concernant le système de localisation navstar gps le mode search the sky est ?
Une procédure qui débute après la mise en marche du récepteur s'il n'y a pas de donnée relative aux satellites stockée en mémoire.
Un procédé continu conduit par le segment sol, afin de surveiller les satellites. une procédure conduite par le récepteur, afin de reconnaître les nouveaux satellites devenant opérationnels. une procédure continue conduite par le récepteur qui balaie le ciel à la recherche de satellites s'élevant au dessus de l'horizon.
Question 194-32 : Des propositions suivantes celle qui est un prérequis à l'utilisation d'un récepteur navstargps associé à un système multi senseurs est ?
Un équipement ifr standard doit être installé et être opérationnel.
Un équipement ifr standard doit fonctionner et afficher de manière continue les informations de navigation. la fonction raim du récepteur gps doit être capable de surveiller tous les systèmes de navigations règlementaires. les systèmes multi-senseurs ne sont pas certifiés pour le vol ifr.
Question 194-33 : Quelle est la source utilisée pour l'information d'altitude lors de vols en conditions imc utilisant le système gpsnavstar pour la navigation ?
L'altitude barométrique.
Légalement vous devez prendre l'information d'altitude depuis la chaine barométriquedes milliers d'avions volent chaque jour avec comme altitude une référence prise depuis les sondes barométriques hormis le cas de l'af447 qui avait des sondes thalès litigieuses test d'homologation probablement non conforme elles sont dégivrées et fonctionnent très bienLa moyenne entre l'altitude gps et l'altitude barométrique. l'altitude gps. l'altitude gps si on reçoit 4 satellites ou plus, sinon l'altitude barométrique.
Question 194-34 : La visibilité des satellites du système navstargps est ?
Variable dépendant du temps et de la position de l'observateur.
Constante, quelque soit la position de l'observateur. maximale pour un observateur situé sur l'équateur. maximale pur un observateur situé aux pôles.
Question 194-35 : Combien de satellites opérationnels sont nécessaire pour la pleine capacité opérationnelle full operationnal capability du système de navigation satellitaire navstargps ?
24.
167718. 12. 30.
Question 194-36 : Le système de navigation par satellite avec foc full operational capability homologué pour certains vols ifr en europe est ?
Navstargps.
Nnss-transit. cospas-sarsat. glonass.
Question 194-37 : Les satellites du système gps transmettent leurs signaux sur deux fréquences de 1575 mhz et 1227 mhz et fournissent deux codes possibles qui sont accessibles en fonction de la qualité de l'utilisateur civil ou militaire en aviation civile on utilise ?
Seulement la fréquence de 1575 mhz et un seul code.
Ce sont les codes ca et ple code pseudo aléatoire ca coarse acquisition aussi nommé sps et le code pseudo aléatoire p precision ou pps le premier est librement accessible le second est réservé aux utilisateurs autorisés us army Seulement la fréquence de 1575 mhz et deux codes. seulement la fréquence de 1227 mhz et un seul code. les deux fréquences et un seul code public.
Question 194-38 : La valeur de dop dilution of precision est fonction de ?
La géométrie et du nombre de satellites en vue.
La précision avec laquelle la distance entre le satellite et le récepteur peut être mesurée. la disponibilité du système embarqué de renforcement (abas). la présence de la fonction raim dans le récepteur gps.
Question 194-39 : Les différents segments du système de navigation par satellites gpsnavstar sont ?
Les segments de contrôle spatial et utilisateur.
La station de contrôle principale, la station de surveillance et les antennes sol. les antennes, le récepteur et l'unité de contrôle centrale (cdu). l'horloge atomique, l'alimentation et le transpondeur.
Question 194-40 : Une des tâches du segment de contrôle du système de navigation gpsnavstar est de ?
Surveiller l'état des satellites.
Fabriquer et lancer les satellites. manipuler les signaux des satellites sélectionnés afin de réduire la précision de la position calculée. accorder et surveiller les autorisations des utilisateurs.
Droits exclusifs réservés. Reproduction interdite sous peine de poursuites.