Un compte Premium offert sur le site FCL.055 ! Lire ici
17 membres en ligne en ce moment. Rejoignez-les pour consulter nos 15164 questions (20 mises à jour AUJOURD'HUI)
Question 184-1 : La longueur d'onde d'un radiophare non directionnel ndb de fréquence 300 khz est de ? [ Question protocole ]
1000 mètres
Question 184-2 : Un dme en mode poursuite expérimente une réduction de puissance du signal basculera l'équipement de bord en premier lieu en ?
Mode mémoire.
Recherche de signal contrôlé. mode recherche. mode attente.
Question 184-3 : Pourquoi un dme émet il en paires d'impulsions ?
Pour ne pas être perturbé par les émissions d'un radar à impulsion simple.
Pour augmenter le nombre d'avions pouvant interroger la station simultanément. pour améliorer la fiabilité et la précision de la distance. pour séparer les fréquences d'interrogations et de réponses, et ainsi augmenter le nombre de stations dme pouvant transmettre dans la même bande de fréquence.
Question 184-4 : L'indication fromto d'un vor bascule en tofrom et vice versa quand la valeur de la différence entre la course sélectionnée et le radial mesuré passe dans l'une ou l'autre direction de ?
090°.
045°. 180°. 135°.
Question 184-5 : Un dme en mode 'poursuite' l'interrogateur transmet ?
Un nombre relativement faible de paires d'impulsions par seconde.
Un nombre relativement élevé de paires d'impulsions pour un effet multitrajets. un grand nombre de paires d'impulsions par seconde pour obtenir une mesure précise de distance. un nombre de paires d'impulsions relativement faible pour se prémunir d'une surcharge-transpondeur.
Question 184-6 : L'interception du faisceau glide d'un ils s'effectue normalement entre ?
3 et 10 nm.
10 et 15 nm. 20 et 30 nm. 2 et 5 nm.
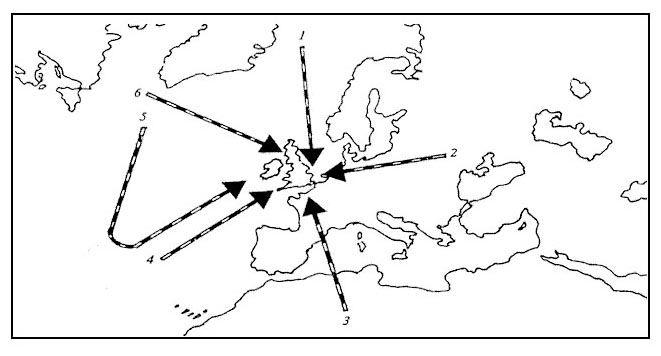
Question 184-7 : Comment se positionner au mieux afin d'éviter les mauvaises réceptions d'un adf situé sur les terres lorsque l'on vole le long de la côte ?
Perpendiculairement à la côte sur une droite passant par la station.
1684En descendant au plus proche de la surface. le positionnement n'a pas d'importance. avec un gisement de 090° ou 270° de la station.
Question 184-8 : La précision d'un dme ?
Diminue avec une augmentation de la distance.
Augmente avec une augmentation d'altitude. est approximativement de +/- 0,5 nm. est approximativement de +/- 2 nm.
Question 184-9 : Un vot est un ?
Vor test.
Un vot vor test est une station vor mettant un signal pour tester les indications vor dans un aéronefVor terminal. vor expérimental. vor en route.
Question 184-10 : Lors d'une approche ils la déviation maximale autorisée sous le glide indiquée par un cdi '5 points' est de ?
25 points.
1 point. 1,5 points. 2 points.
Question 184-11 : La pleine déviation de l'aiguille localizer indique que l'aéronef est à un décalage d'environ ?
25° de l'axe de piste.
10° de l'axe de piste. 1,25° de l'axe de piste. 5° de l'axe de piste.
Question 184-12 : Si un dme en mode recherche n'arrive pas à se verrouiller ?
Il reste en mode recherche mais réduit son rythme d'interrogation à 60 pps passé l'émission de 15000 pps.
Il reste en mode recherche avec un rythme d'interrogation de 150 pps. il alterne entre mode recherche et mode mémoire toutes les 10 secondes. il reste en mode recherche mais réduit son rythme d'interrogation à 60 pps au bout de 100 secondes.
Question 184-13 : Chaque dme dispose de son propre indicatif en trois lettres celui ci est émis en morse sur la fréquence ?
1350 hz.
L'indicatif morse de la station dme est transmis toutes les 30 secondes sur la fréquence 1350 hzla fréquence en question est une fréquence 'audible' par le pilote ce qui n'est pas le cas des fréquences en mhz1020 hz. 1350 mhz. 1020 mhz.
Question 184-14 : Le nombre de paires d'impulsions maximales émises par une station dme au sol est de ?
2700 pps.
5000 pps. 500 pps. 15000 pps.
Question 184-15 : Une station dme sol doit pouvoir traiter jusqu'à 100 avions en même temps dont au moins ?
95% en poursuite et 5% en recherche.
100% en recherche. 100% en poursuite. 95% en recherche et 5% en poursuite.
Question 184-16 : L'outer marker se situe à une distance du seuil de piste de ?
6 11 km.
16716-11 nm. 15-20 km. 15-20 nm.
Question 184-17 : L'information lue sur un adf n'est pas fiable ?
La nuit en raison de l'affaiblissement de la couche d de l'ionosphère.
L'affaiblissement de la couche d de l'ionosphère la nuit fait que l'onde va plus haut dans le ciel augmentant le distance de sautLa nuit, en raison de l'affaiblissement de la couche e de l'ionosphère. la nuit, en raison de l'affaiblissement de la couche f de l'ionosphère. le jour, en raison de l'affaiblissement de la couche d de l'ionosphère.
Question 184-18 : Quand un dme est associé à un mls le retard est de 1 50 microsecondes pour le mode x2 50 millisecondes pour le mode x3 56 microsecondes pour le mode y4 56 millisecondes pour le mode yla combinaison regroupant l'ensemble des affirmations correctes est ?
1 et 3.
1 et 4. 2 et 3. 3 et 4.
Question 184-19 : En mode poursuite le dme de bord interroge avec une fréquence de récurrence ?
Variable de 5 à 25 fois par seconde.
En mode recherche le dme interroge la fréquence à 146 hz 146 fois par secondes tandis qu'en mode poursuite on interroge la fréquence à 21 hz 21 fois par secondes Fixe selon la distance entre 5 et 25 fois par seconde. de 2700 fois par seconde. de 150 fois par seconde.
Question 184-20 : Une station vor cesse automatiquement d'émettre si une variation dans le relèvement transmis est supérieure à ?
1°.
2°. 1.5°. 0.5°.
Question 184-21 : La différence entre un cvor et un dvor indique que le dvor est plus précis car ?
Il est moins sensible aux erreurs générées par l'environnement bâtiments collines .
Le signal de référence est de 50 hz au lieu de 30 hz. il est modulé en fréquence et l'autre en phase. il est doté d'un système de surveillance.
Question 184-22 : L'impulsion p2 d'une interrogation en mode ac a pour fonction ?
D'éviter des réponses d'aéronefs situés dans la direction des lobes secondaires de l'antenne de l'interrogateur.
D'éviter le chevauchement si deux aéronefs sont situés dans la même direction de l'interrogateur et à une distance de moins de 1,7 nm. de déterminer le mode d'interrogation. pour éviter le 'fruiting' si un avion est interrogé par plus d'un radar secondaire.
Question 184-23 : Si un transpondeur reçoit une impulsion p2 plus grande que l'impulsion p1 et p3 ?
Les émissions du transpondeur seront supprimées pendant un court intervalle.
Les émissions du transpondeur sont supprimées si l'amplitude de réception de p2 est au moins égale à l'amplitude de réception de p1 la détection de p3 n'est pas exigée comme préalable de cette suppressionLa station émettrice est hors service. l'émission du transpondeur sera augmentée. les impulsions p1 et p3 seront renforcées pour atteindre le même niveau.
Question 184-24 : L'intégrité d'un système vor est amélioré par ?
Un système automatique de surveillance au sol.
Des balises de test vor (vot) sur les plateformes aéroportuaires. au moins deux récepteurs vor indépendants embarqués. un récepteur de surveillance autonome embarqué.
Question 184-25 : Le contrôleur d'une station goniométrique sol vous passe le message suivant 'votre relèvement vrai est 256° classe alpha'il s'agit d'un ?
Qte précis à ± 2°.
2559bravo très très belle question de l'easa rien à dire ils nous avaient promis d'orienter la base de qcm ecqb vers des questions plus pertinentes et pragmatiques pour les futurs pilotes c'est fait il existe 4 classes de précision pour les vdf classe a + 2°classe b + 5°classe c + 10°classe d + de 10°relèvement vrai depuis la station qteQdr précis à ±2°. quj précis à ± 3°. qte précis à ± 5°.
Question 184-26 : Des propositions suivantes quelle est celle qui correspond à une classe et une qualité de précision d'une station goniométrique vdf ?
Classe a ± 2°.
2604le gars de l'easa qui a écrit cette question devrait faire une poseil existe 4 classes de précision pour les vdf classe a + 2°classe b + 5°classe c + 10°classe d + de 10°Classe a ± 10°. classe c ± 2°. classe d ± 5°.
Question 184-27 : Un aéronef est en rapprochement sur le radial 073° du vor x et a une dérive de 12°l un report de position est demandé en passant le radial 133° du vor y si l'aéronef est sur la route les indications rmi au point de report seront ?
Question 184-28 : Dans le cas ou une station dme est soumis à plus de 100 interrogations quel s aéronef s ne recevront plus de réponse de la part du dme ?
Celui ceux qui ont l'émission la plus faible.
Les plus proches. les plus éloignés. ceux à plus de 200 nm.
Question 184-29 : Dans le cas ou une station dme est soumis à plus de 100 interrogations quel s aéronef s recevrons une réponse dme ?
Ceux qui ont l'émission la plus puissante.
Les plus proches. les plus éloignés. ceux à plus de 200 nm.
Question 184-30 : La limitation d'une station dme est due ?
Au nombre de retour de paires d'impulsions par seconde que le transpondeur dme peut émettre limité à une certaine valeur maximale.
à la précision minimale admissible de la mesure de la portée ne peut être garantie quand plus de 100 aéronefs environ utilisent la même station dme. à la mémoire du transpondeur dme qui est limitée en taille. à la station sol de suivi automatique de chaque station dme qui a une capacité limitée.
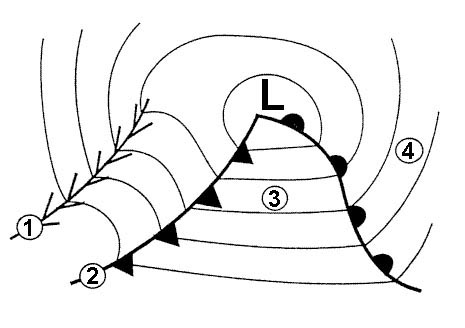
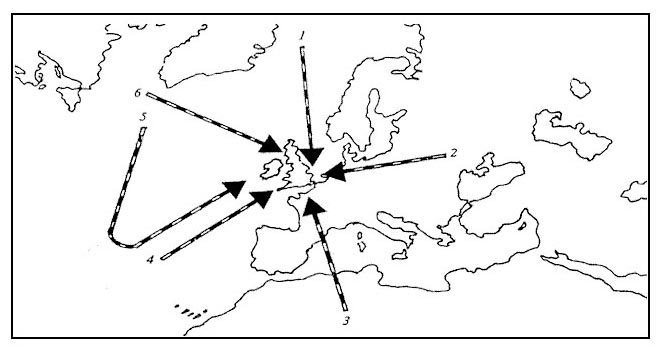
Question 184-31 : Quel s secteur s devez vous utiliser pour entrer dans l'attente d'une boucle d'arc dme ?
1 ou 3.
Il s'agit d'une question qui aurait plutôt sa place en 010 avec les procédures d'entrées en attente la formulation n'est pas celle officielle de l'examen mais la réponse attendue est bien 'secteur 1 ou secteur 3'elle est présente en 062 car elle répond au learning objective 062 02 04 02 qui demande la présentation et l'interprétation du dmesecteur 1 entrée parallèlesecteur 2 entrée décaléesecteur 3 entrée directele secteur 2 se situe sur l'arc dme c'est la raison pour laquelle il ne figure pas dans les secteurs autorisées pour entrer dans une attente située sur le début de l'arc dme1 ou 2. 1, 2 ou 3. 2 ou 3.
Question 184-32 : Le flag drapeau d'un récepteur vor sera activé pour ?
Une absence de modulation 90 et 150 hz simultanément.
Session de février 2016 oscarjuliet la modulation 90hz et 150hz ne concerne t elle pas plutôt l'ils si on est trop bas 'le plafond est inférieur aux minimas' on ne captera pas le signal d'où l'apparition du flag corrigez moi si je me trompeles modulations 90 hz et 150 hz concernent le faisceau loc et glide de l'ils mais vous pouvez sur un récepteur vor utiliser le faisceau localiserla réponse 'un plafond inférieur aux minimas' n'est pas juste les récepteurs de bord vorils ne sont pas en mesure de définir le plafond autorisé pour l'approche considérée approche cat i ii ou iii vordme ndb etc vous pensez peut être à l'alarme 'minimum' que l'on peut entendre lorsque l'aéronef descend à l'altitude de décision ou l'altitude minimale de descente pour une approche vor mais cette alarme sonore etou visuelle ne concerne pas le 'flag' sur l'instrumentUn plafond inférieur aux minimas. une absence de modulation 90 ou 150 hz. un ddm inférieur à 0,2.
Question 184-33 : Le d vor est moins sensible au perturbation car ?
Le signal variable est modulé en fréquence.
Feedback partiel la question et la bonne réponse ont été correctement rapportées les fausses propositions ont été inventées ecqb01 avril 2013le vor doppler est la deuxième génération de vor il offre une qualité de signal et de précision supérieur au vor conventionnelle signal de référence 30 hz est transmis omnidirectionnellement par modulation d'amplitude de l'onde vhf et l'information d'azimut c'est à dire le signal variable est transmis par modulation de fréquence à 30 hz des deux bandes latérales 9960 hz de l'onde porteusececi signifie que c'est l'inverse du cvor où le signal omnidirectionnel est modulé en fréquence et le signal directionnel est modulé en amplitudele signal modulé en fréquence est moins sujet aux interférences que le signal modulé en amplitude et donc les signaux reçus sont plus précis et plus fiablesLe signal omnidirectionnel est modulé en fréquence. le signal directionnel est modulé en amplitude. le signal variable est modulé en amplitude.
Question 184-34 : Un ils est ?
Calé en site et en azimut.
Examen de juin 2003 de df nouvelle questionsCalé en site uniquement. calé en azimut uniquement. calé en site et en azimut pour les ils cat ii et iii, et en site uniquement pour les ils de catégorie i (cat i)
Question 184-35 : Un dme en mode 'poursuite' diminue sa fréquence de récurrence pour ?
Ne pas saturer la station sol.
Feedback partiel la question et la bonne réponse ont été correctement rapportées les fausses propositions ont été inventées ecqb01 avril 2013en mode 'poursuite' la fréquence des interrogations diminue elle n'est plus que de 25 paires de signaux par seconde au lieu de 150 en mode 'recherche'Augmenter la précision de la mesure. réduire la consommation électrique. ne pas interférer avec les autres récepteurs dme.
Question 184-36 : Concernant le système de contrôle d'un vor l'affirmation correcte est ?
L'impossibilité pour la station vor de rester dans les limites spécifiées peut entrainer l'arrêt de l'émission de l'identifiant et du signal de navigation.
Le système contrôle directement la phase du signal de référence et la phase du signal variable. le système de contrôle détecte un changement du radial mesuré et réduira la puissance de transmission, ainsi seul les avions situés dans le secteur d'approche pourront utiliser le vor. l'impossibilité pour la station vor de rester dans les limites spécifiées déclenchera l'indication d'anomalie vor dans le cockpit.
Question 184-37 : L'adf peut être utilisé ?
Pour écouter des radios commerciales opérant dans la frequence lfmf.
Session informatique avril 2012 l'intitulé et les réponses peuvent être légèrement différentsen activant le mode bfo et en sélectionnant certaines fréquences lfmf vous pouvez recevoir des stations radios comme 'france inter' par exemplePour recevoir des émissions volmet. comme vdf. pour écouter un atis.
Question 184-38 : Si un vor et un dme sont co implantés ?
Les deux stations ont le même indicatif qui est transmis à différentes tonalités.
Lorsque vous sélectionnez un vordme vous sélectionnez uniquement la fréquence vor sur votre ensemble de navigation nav1 ou nav2 quand vous écoutez l'identification morse c'est la même pour le vor et le dme vous entendez donc le même indicatif 4 fois en 30 secondes l'indicatif du dme est celui le plus aigu et n'a été transmis qu'une seule foisla fréquence dme est couplée au vor c'est à dire que lorsque vous allez sur le vor vous allez aussi sur le dme si la station dme est trop éloignée du vor l'information de distance affichée sur le dme pourra être trompeuse surtout en étant très proche de la station vor on a donc défini un maximum de distance acceptable au delà de 600m on donnera une fréquence et une identification différente au vor ou au dmeLes deux stations ont le même indicatif qui est transmis à la même tonalité. les deux stations ont différents indicatifs qui sont transmis à la même tonalité. les deux stations ont différents indicatifs qui sont transmis à différentes tonalités.
Question 184-39 : Si la phase de référence diffère de 30° par rapport à la phase variable le radial depuis la station vor sera de ?
030°.
Un vor émet deux signaux l'un non directionnel émission circulaire est émis par une antenne centrale ayant une phase constante indépendante de l'azimut et appelée phase de référence r un second signal dont la phase varie avec l'azimut est émis par quatre autres antennes accouplées deux à deux pour cette émission et placées à chaque coin il s'agit d'un signal à face variable v r et v sont en phase au nord magnétique le récepteur vor à bord de l'avion mesure la différence de phase entre r et vsi r et v diffèrent de 30° l'avion est sur le radial 030°si r et v diffèrent de 60° l'avion est sur le radial 060°etc330°. 210°. 150°.
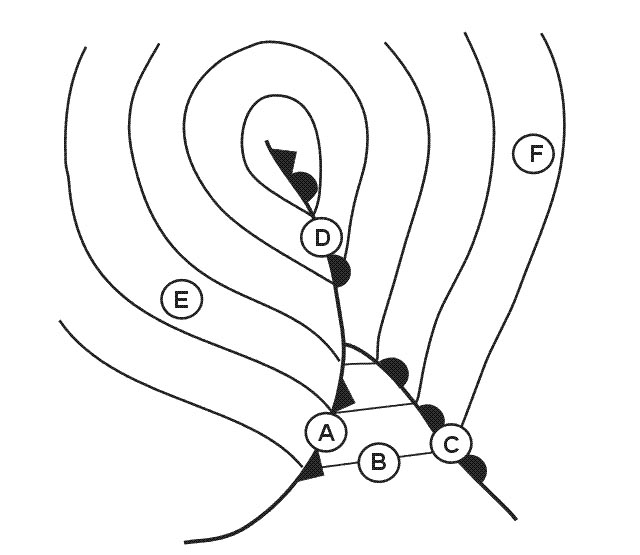
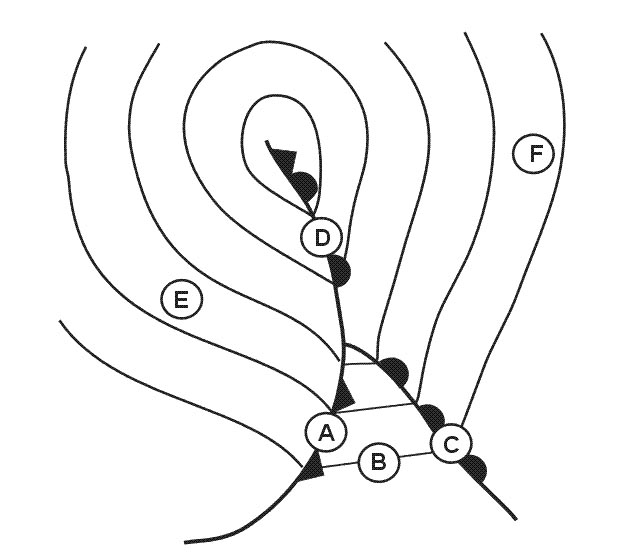
Question 184-40 : Un avion en approche ils reçoit plus de modulation 90 hz que de modulation 150 hz des émetteurs localiser et glide pathl'indicateur ils indiquera qu'il faudrait ?
Voler vers la droite et vers le bas.
Youkounkunz x 90 90 + 150 150vu dans le sens de l'approche idem adi le x indique la position actuelle le + indique la seule position où l'on reçoit autant 90 que de 150 et ce dans les deux axes bbqxvptckehb 9090 150150Voler vers la gauche et vers le haut. voler vers la droite et vers le haut. voler vers la gauche et vers le bas.
Droits exclusifs réservés. Reproduction interdite sous peine de poursuites.